共享无人驾驶交通系统调度技术综述
研究背景与意义
众多研究证明共享无人驾驶车辆(SAVs)交通系统,能实现车辆完全可控并为乘客提供个性化服务,即克服导致共享单车大量倒闭的运维及调配难题,也消除了制约公交竞争力的准时性、舒适性、覆盖性差的不足,有望成为未来城市交通的主体出行模式之一,并在很大程度上解决交通拥堵、环境污染、能源紧缺等城市病。目前关于SAVs的研究多集中于国外,对SAVs系统的能源排放、车队规模、动态共乘等问题进行了研究,取得了一定进展,中国一些学者也对SAVs进行了较为宏观的介绍。
本文从SAVs交通系统出行需求产生方式、车辆与需求匹配方式、车辆路径规划与车辆再平衡方式角度总结了SAVs系统的运行模式,包括所采用的策略和方法,以及系统设置变化对SAVs系统性能的影响。
1 SAVs发展优势与阻碍
SAVs系统结合了无人驾驶车辆的优势,既能提供门到门式的定制化服务,又更加安全、便捷和易于管理,很有潜力成为未来大众出行的新方式。然而目前SAVs系统还未形成统一的无人驾驶车辆管理体系来进行车辆认证、事故责任认定、出行信息隐私保护等,且由于无人驾驶车辆完全由网络控制,黑客的攻击将成为SAVs交通系统的风险之一,适合大规模市场的车辆定价、无人驾驶车辆大规模使用对交通系统影响的不确定性都会对SAVs系统的发展产生阻碍。但这些情况随着科技的发展以及相应政策的制定会得到改善与解决,未来SAVs系统的发展仍十分有潜力。
表1 SAVs交通系统相对传统共享车辆的优点

2 SAVs运行模式
SAVs系统具有多种运行模式,包括不同的策略、方法和系统参数设置,这将导致不同的结果,对系统性能产生正面和负面的影响。
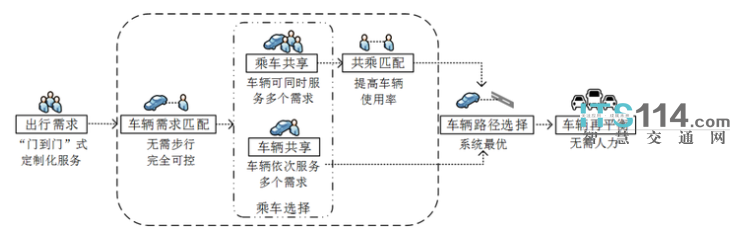
图1 SAVs系统运行过程
2.1 SAVs系统出行需求生成
目前SAVs系统出行需求多基于出租车历史数据或利用个体为本模型产生。需求生成方法主要有:(1)区域划分成块,将出行起终点与各个块的质心等同,或将出行起终点定位到距离最近的交叉口;(2)根据时间和区域的不同确定出行吸引系数来随机生成出行;(3)基于排队论,假设乘客到达服从泊松分布来生成出行需求;(4)采用SimMobility、Transims、MATSim等模拟平台。
SAVs系统出行需求提交方式分为实时申请和提前预定,实时申请系统会立即或在短时间内处理申请,由于不清楚未来需求,只能做出当前时间段内最优的安排,而预约系统已知全部或较长时间段内的出行,有更多时间从全局进行最优化处理。在生成与处理出行需求时,实时系统中通常以一个时间步长分批处理乘车需求,虽然这样操作会使得乘客和车辆在新时间段开始前等待,出现一定程度的聚集,但这是将连续问题离散化后解决,再回归到更精确时间尺度进行模拟的人工产物。在预约系统中,需求处理时间步长越长,车辆利用率越高。
不仅出行请求提交的方式,需求在数量和分布上的变化也会对系统性能产生影响。出行需求生成情况对平均等待时间影响较大,不同的SAVs系统设置会导致相反的结果。当需求空间强度增加时,SAVs对私家车的替代率增加,空车行驶里程减少,这是因为较为分散的需求分布下车辆需行驶更长距离接乘客,尤其在SAVs系统实施的早期阶段,较少需求产生的大量车辆行驶里程(vehicle milestraveled,VMT)将提高成本,但随着SAVs车队规模的扩大,这些成本将降低。当考虑拥堵影响时,随着需求的增加,由于为了避免拥挤而绕路,平均车辆行驶时间和VMT将增加,当需求增长到2000人左右后,由于车辆与出行者匹配的可能性更大,VMT将略有下降。
2.2 SAVs系统车辆与需求匹配模式
共享车辆在确定乘车需求后,系统可允许汽车共享(Car-sharing),即车辆每次只服务一个需求,以及乘车共享(Ride-sharing),即车辆每次可同时为多个起终点相似的需求提供服务。两种乘车选择在车需匹配方式上略有不同,汽车共享系统只需要将合适的车辆与需求匹配,而乘车共享系统还需将多个需求进行匹配来以一辆车进行服务。
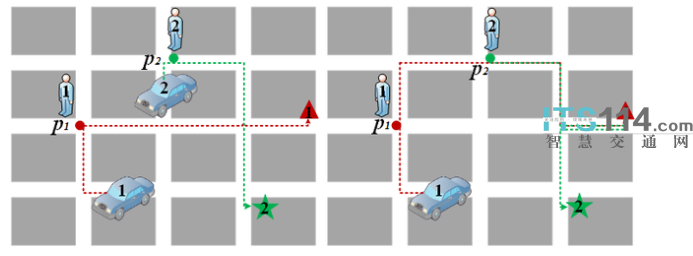
图2 汽车共享系统与乘车共享系统
2.2.1 SAVs汽车共享系统车需匹配
SAVs系统需要将成本最低的车辆分配至乘客进行服务,一些研究使用规定策略进行车需匹配,通常采用与需求距离最短的车辆,随机遍历、修正的Dijkstra's、混合模拟退火法等算法被用于寻找最佳车辆。先到先服务(First-in-first-out,FIFO)策略也常与其他算法结合使用。此外,构造优化模型也是进行SAVs系统车需匹配的一种方式。
对于汽车共享系统,SAVs对私家车的替换率和车队规模是主要研究内容之一。研究表明3到13.4辆SAVs可以取代一辆私家车。但如果考虑路网拥挤的影响,这些结果可能是次优的,因为当需求增加时所有SAVs的使用会增加拥挤,平均车辆行程时间也将增加。
2.2.2 SAVs共乘系统车辆与需求匹配
SAVs共乘系统虽然对于个体来说会因额外接送其他乘客和绕路而造成不便,但可以提高车辆的使用率。SAVs系统共乘分为静态共乘与动态共乘(Dynamic Ride-Sharing,DRS)。静态共乘需在车辆出发前确定行程,出发之后不能改变。这种共乘方式灵活性较差,没有发挥资源最大潜力。而动态共乘在行程开始之后,仍可在满足乘客和系统约束的情况下,对乘客进行实时动态匹配。动态共乘中系统经常通过设置限制条件来动态匹配出行请求,如假设共乘的出行时间不能超过限定值,可以共乘乘客的起始点要在规定的路径集内,基于图论进行需求匹配等。
为了简化问题,SAVs系统总是假设每个旅行需求包含一个乘客,且车容量与共乘人数限制通常是相等的,多数研究假设合乘数量限制为2至4个出行。在SAVs系统共乘中车队规模依赖于车容量,且当车容量增加时,服务比例、共乘VMT均提高,总VMT降低。
动态共乘虽然增加了个人出行的不便,但可以改善SAVs系统整体运行。动态共乘可以减少4.2%至4.7%的VMT,且增加出行灵活性和共乘比例会更大程度降低VMT。研究还发现动态共乘可以减少高峰时段乘客等待时间,平均总服务时间(等待时间加上在车时间)也会从15.0分钟降到14.7分钟,而未采用动态共乘的SAVs系统由于空车再平衡将增加3%至20%的行程时间。即使平均等待时间略有增加,共乘可以将SAVs车队规模减少至原规模的59%,除此以外,共乘将使系统更多的关注需求高的地区而减少郊区服务。SAVs共乘系统中足够的车队规模能够提高系统服务水平,随着车队规模增加,乘客等待时间减少,总出行时间将降低,但其未考虑路网拥挤造成的影响,因此有学者认为在DRS系统中较少的SAVs表现较好,因为较小的车辆规模不易产生拥堵,但是随着车辆数量增加,车辆为接乘客而进行的迁移将减少,VMT也随之减少。
2.3 SAVs系统车辆路径选择和行驶时间计算
SAVs系统的车辆路径问题(Vehicle Routing Problem,VRP)通常采用整数规划算法或启发式算法来优化车辆的移动。在路径选择过程中,系统需根据行驶速度以及行程时间才能做出合适的路径选择。一些研究假设路段行驶时间是固定的,而在交通实际中,各种因素导致的不确定性,尤其交通拥堵,使得路段行驶时间是变化的。一些学者假设路段旅行速度随时间变化来反映不同级别的拥挤,或在模型中添加一个反映延迟的参数以表示拥挤、加油、检查等各种情况对行程时间的影响。一些研究利用MATSim或SimMobility估计出行时间来反映拥堵的动态特征。这些研究具有一定意义但缺乏现实的车流模型,使得SAVs服务的优势可能在现有结果中被夸大。因此,Levin 等在系统中加入一个能反映无人驾驶车辆流量-密度关系的模型,发现辆SAVs可以代替3.6辆私家车,低于其他研究中的十几辆私家车。
2.4 车辆再平衡模式
车辆再平衡或重定位是将合适的SAVs分配到需求过多、车辆不足地区的过程。基于传统的共享车辆系统,SAVs系统车辆再平衡可分为基于站点的模型(station-based model)和自由浮动模型(free-floating model)。基于站点的模型在站点之间进行车需平衡,例如依据站点车辆阈值平衡车辆,或假设车辆返回最近的或初始的站点。自由浮动模型中车辆空闲时停在路边,且通常基于区域之间的供需平衡进行车辆再平衡。研究发现当站点数量较大时,由于车辆行驶里程较少,基于站点的模型比自由浮动模型更合适。为了更好地达到SAVs与需求的平衡,节省乘客等待时间并使系统服务尽可能多的需求,有效的再平衡策略是关键,且较粗分辨率再平衡策略比较细分辨率策略更能减少等待时间。为了减少空车行驶里程,在租赁结束后移动至附近站点是最佳再平衡策略。
SAVs系统再平衡过程可以减少等待时间,但再平衡过程由于空车移动将增加VMT,尤其空车移动造成的道路拥堵会更严重的影响VMT,虽然有研究表明再平衡不会增加对称道路网络的拥堵,然而根据所研究的SAVs交通系统设置不同,可能会产生不同的结果。对于SAVs系统再平衡,乘客等待时间与VMT是一对矛盾,减少乘客等待时间需要车辆再平衡以实现合理分布,但这必然会导致系统VMT的增加,因此在再平衡策略制定中,研究者们通常要对这两个参数进行权衡。除此以外,多个研究表明再平衡可以减少车辆数量,且不同的再平衡模型对再平衡时间间隔很敏感,离线模型中时间间隔太长会导致对车队规模的高估,在线模型中时间间隔太短会导致高峰期的再平衡,尤其是存在预订需求队列的情况下。
2.5 SAVs系统运行模式及影响
SAVs的运行方式和参数变化都会对系统性能产生影响,表2总结了需求、车队规模、共乘增加和采用再平衡对系统性能的积极与消极影响。研究发现,在不同的运行环境下,SAVs交通系统可能会出现相反的结果,例如,在考虑拥挤影响时,乘车需求的增加会对车辆行驶里程产生消极影响,而在不考虑拥挤的情况下,乘车需求的增加会对车辆行驶里程产生积极影响。因此,运行模式对SAVs系统的性能十分重要。
表2 SAVs运行方式对系统性能的影响

2.6 研究现状评述
目前对于SAVs系统出行生成的研究,大多数未考虑到因出行方式改变而造成的需求变化与转移,例如在SAVs投入使用后,一些没有驾照或担心单独出行安全问题的出行者可能会使用SAVs,原本乘坐公交、地铁的出行者可能会因为便捷性转而使用SAVs,这些因素都会造成SAVs系统出行需求变化。一些研究虽然对出行方式的改变进行了考虑,但更加深入和符合实际的量化研究依然是必要的。且对于SAVs系统出行需求生成多数研究采用个体为本模型,因为相对于流体动力学和排队论这些较为宏观的模型,个体为本模型能够表示更为细节和复杂的出行行为,但模拟过程也更加复杂。
在SAVs交通系统车需匹配与共乘匹配研究中,多借鉴了传统共享汽车以及出租车的相关理论与方法,但SAVs系统能自主移动,可实现系统对车辆的完全可控,而不是传统车辆下的部分可控,响应更加及时迅速,能够达到系统最优的效果。在这些研究中,对于乘客等待时间、合乘选择、可接受绕行时间或距离、乘车费用、合乘人数等SAVs交通系统参数多直接假设,而这些设置不一定是最优或符合SAVs乘车实际的。且车需匹配优化目标和约束条件考虑的因素相对比较单一,可以从SAVs用户效益、SAVs经营者效益、城市交通总体效益等多方面综合考虑。此外匹配结果的时效性和求解效率难以符合实际要求,实际中这一时刻的最优解在下一时刻可能发生变化,对结果实时修订与优化能够获得更有时效性的结果。
对于考虑拥堵影响的路段行程时间计算,一些研究令路段行驶速度随时间变化,但这种变化并不是在短时间内的实时变化,而是以几小时为分隔设定不同速度,在时间段内路段行驶时间仍是固定的,并不能很好反映出路段实时交通状态,但模型建立与求解相对于考虑现实车流模型要简单。考虑现实交通流模型的方法,进一步揭示了拥堵对SAVs交通系统的影响,但在真实大型路网中的应用还缺乏扩展,且均考虑的是路段拥堵,对于交叉口可能造成的延误或溢流现象未予以考虑。
虽然再平衡过程会增加SAVs系统VMT,但对于系统整体性能的提升是十分必要的,且增加的VMT可以通过有效的再平衡策略与算法进行缓解,尽可能达到各个系统性能指标的平衡。对于多数研究中采用的在线再平衡方式,基于当前交通状态进行调度能够考虑路网拥堵造成的影响,但其对于未来需求预测的准确性在很大程度上影响了平衡结果。离线再平衡基于历史数据进行车需平衡调度,不能反映出路网实时交通状态,但在平衡结果相差不多的情况下也不失为一种有效的再平衡方式,能够降低问题的复杂度以及对时效性的要求。
3 结语
SAVs交通系统是结合了传统共享车辆系统与无人驾驶车辆的一种未来交通出行新方式,不仅能够为乘客提供“门到门”式的定制化服务,其服务的高效性能够有效缓解拥堵等城市交通问题。本文梳理了SAVs系统的运行过程,介绍了各个过程的运行模式,采用的策略以及方法等,并总结了不同的运行方式对SAVs系统性能产生的重要影响。针对现有研究成果,本文提出了一些可能提高SAVs系统性能的未来研究方向:
(1)SAVs系统出行需求针对性研究。目前SAVs交通系统的研究中,对于出行需求的生成只是作为一个步骤去完成,而进行针对性研究的却不多。然而由于出行方式的改变,单纯基于历史出行、区域位置以及人口分布等数据生成SAVs系统出行需求不能突出反映出SAVs系统特征,未来可对出行方式改变带来的需求改变与需求转移进行符合实际的量化,考虑乘车收费随出行延误增加而降低的动态费用模式对出行需求的影响,并结合出行方式选择模型,进行SAVs出行需求预测模型研究,使SAVs交通系统更符合实际。除此以外,未来可采用意向调查方式,结合出行大数据、网约车和共享车数据,对出行者使用SAVs的可接受等待时间、绕行距离、出行费用、时间可靠性和合乘选择等因素进行调查并分析。目前研究中的这些因素多基于假设或不予以考虑,但这些会对出行者是否选择SAVs作为出行方式造成很大影响。
(2)SAVs系统匹配与调度优化研究。①考虑不同模式下的SAVs系统调度优化,例如:反映周末特征、季节变化特征、发生特殊事件(事故、特殊天气等)时的SAVs调度系统;不同城市网络拓扑结构中(例如对称与非对称路网)的SAVs系统;多种类型车辆共存的SAVs系统调度优化;将停车费用纳为系统运行费用计算中,使得车辆在服务完需求后并不一定停在终点或附近站点,而是停在费用低的位置。②对于解决SAVs系统与轨道交通连接问题的研究,多单纯考虑轨道站点与区域之间的交通出行,而未来可同时考虑轨道交通站点至区域,以及区域至区域之间SAVs出行的协同效应。③对于路网拥堵的考虑虽已有研究采用了现实的交通流模型,但车辆路径问题缺乏自创拥堵反馈的动态拥堵感知系统。④此外,共享电动自动驾驶车辆(Shared Autonomous Electric Vehicle Services,SAEVS)由于更加环保、节约燃油等优势开始被学者们研究,未来可以基于其充电特性,考虑车辆电量与行驶距离的关系,使其与车辆匹配与再平衡调度结合,还可对充电站点布置进行研究,使资源使用最大化。
(3)SAVs系统调度策略、模型与算法研究。SAVs系统研究中采用了不同的策略、模型和方法,但由于系统设置不同,具有不同的效果。未来可对不同SAVs系统下的策略与方法进行对比和系统研究,包括它们的优缺点,以及哪种最为有效或在哪个方面具有突出优势,基于多个标准(准时性、系统费用与服务效果等)对其进行评价,为未来系统方案的制定提供借鉴。对于目前采用的一些模型与算法,例如线性规划,难以扩大到大规模路网中,未来可以考虑网络结构模型,也可充分结合微观交通仿真模型对SAVs系统进行更加细节的研究。且由于SAVs系统调度问题属于N-P难问题,目前多采用的启发式算法能够得到有效的次优解,但能够用于实际路网并实时得到最优解的算法依然是未来研究的一项挑战。
(4)SAVs混合系统宏观调度研究。SAVs与公共交通结合不仅可以解决最初或最后一公里问题,对于需求较多并规律的区域可形成固定路线,类似公交但可随时根据乘车需求进行灵活调度,未来可考虑与公共交通结合的SAVs系统与普通SAVs系统并行的综合系统宏观调度。
(5)SAVs广义影响研究。SAVs的使用可能会对路网规划、住宅分布乃至整个城市规划产生影响。相反,当它们发生变化时,也会对SAVs运行模式产生影响。因此,如何在这些宏观因素发生变化时构建合理的SAVs系统运行模式也是一个值得探讨的问题。
主要内容见《中国公路学报》2020年第5期“共享无人驾驶交通系统调度技术综述”(点击下载浏览全文)。
本文作者:崔洪军, 杨依哲, 朱敏清
崔洪军,河北工业大学教授、博士生导师,河北工业大学交通运输学科负责人

延伸阅读!
VIP项目信息
- 公路信息化之800万以下中标项目汇总(4.1-4.15)
- ITS114 智能交通市场每周千万项目(3.29-4.04)
- ITS114 智能交通市场500万以下项目(3.29-4.04)
- ITS114 公路信息化市场每周千万项目(3.29-4.04)
- ITS114 安防市场每周千万项目(3.29-4.04)
- IOV114 运输信息化近期招标项目一览(4月NO.1)
- ITS114 智能交通市场每周千万项目(3.22-3.28)
- ITS114 智能交通市场500万以下项目(3.22-3.28)
- ITS114 公路信息化市场每周千万项目(3.22-3.28)
- ITS114 安防市场每周千万项目(3.22-3.28)
