高精度地图在车路协同系统中的统一化应用探索 - 技术应用 - 智慧交通网 ITS114.COM|中国智能交通领先的门户网站
高精度地图在车路协同系统中的统一化应用探索
2021-02-22 09:25:49
来源:中国交通信息化
作者:李智,张江等
评论:
人
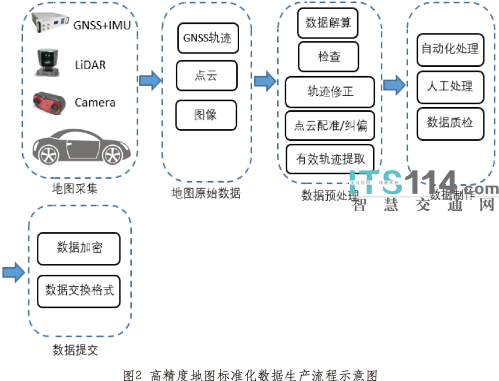
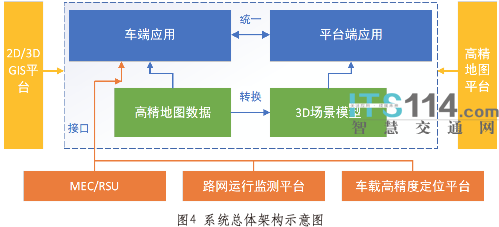
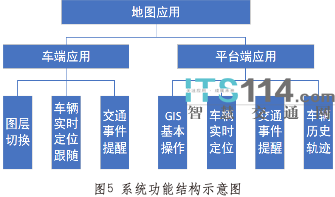
作者:李智1,张江1,仲跻冲2,樊迪2,裴晓栋2(1.首都公路发展集团有限公司;2.北京云星宇交通科技股份有限公司)摘要:在国家加快建设交通强国的政策背景下,开展的高精度地图在车路协同中的统一化应用探索,完成了静态地图与动态信息的融合,利用高精地图突破了车端和路方平台端的数据互通瓶颈,实现了车路协同的统一化应用。2019年9月,中共中央、国务院印发《交通强国建设纲要》,提出大力推动智慧交通,推动大数据、互联网、人工智能、区块链、超级计算等新技术与交通行业深度融合。2020年2月24日,由国家发展改革委、中央网信办等11部委联合印发的《智能汽车创新发展战略》,指出“到2025年,车用无线通信网络(LTE-V2X)实现区域覆盖,新一代车用无线通信网络(5G-V2X)在部分城市、高速公路逐步开展应用,高精度时空基准服务网络实现全覆盖。”当前自动驾驶行业得到空前关注,发展迅速。各国政府出台了多项措施和法规,鼓励本国自动驾驶产业发展,从业者积极探寻自动驾驶的发展之路。研究发现,自动驾驶在相对封闭、路线固定的特定场景中较容易落地。然而由于单车依赖于车载传感器等设备,车辆的感知范围和决策控制能力受限。道路交通系统是由人、车、路组成的复杂系统,人车、车车、车路之间强耦合,和无人驾驶车辆和智能交通的深度融合将成为必然,无人驾驶将进入车路协同智能时代[1]。国际上奥迪、华为等知名企业认识到单车智能局限性,纷纷提出了网联化、协同化的发展路径。因此车路协同建设需求迫切,是V2X的一个重要研究方向。高精度地图作为车方和路方的重要纽带、车路协同的重要载体[2],在车路协同中起到关键作用。本文是在上述背景下开展了高精度地图在车路协同中统一化应用探索。高精度地图需要兼顾多方应用,一方面,面向业主的道路管理需求,高精度地图要能够满足V2X云控平台的应用;另一方面,面向车厂的导航应用需求,提供所需高精度地图车道引导算法、拓扑关系等具体应用。本文采用关键技术探索、原型产品开发、实际道路测试验证等多种方法相结合的研究路线,如图1所示。首先进行静态高精度地图的数据采集与制作,并基于高精度地图自动转换为三维场景。然后将动态信息(如交通事件、交通流等信息)叠加到三维场景中和高精地图上,通过在车端加载高精地图、平台端加载三维场景的方式,实现统一化应用。最后在实际高速公路上进行车端和平台端的统一化验证,确保高精地图能够同时满足车方和路方的实际应用需求。通过车载激光雷达高精度测量技术结合地面辅助测量修正技术,实现道路全线(含长隧道)高精度导航地图的加工生产。高精度导航电子地图的数据规格按照统一标准进行定义和生产,并针对高精度地图使用需求进行定制。本文采用专业化地图采集方式和标准化数据生产流程,以保证高精度地图的精度准确性和地图要素完整性,其生产流程如图2所示。本文主要面向驾驶员和管理者肉眼可识别的展现形式展开阐述。实现车端和平台端统一化,需要做两方面的考虑。一方面要满足车端轻量级可视化展现,另一方面要满足平台端综合可视化展现。对于车端可视化展现,主要考虑车机的硬件性能,因此只对路面和路面的标志标牌等设施进行建模和可视化。对于平台端综合可视化,需要综合考虑周边地形场景融合,因此采用真三维公路场景进行可视化。本文对高精度地图解析,采用自动构建道路路面所有几何和要素三维模型;对其他附属设施,采用3DMAX建模的方法,与路面模型融合。三维道路模型的特征表现为:道路的中心纵截面轴线随地形起伏,周围地形经过一定的填挖处理(路面位于地表以下则挖,路面位于地表以上则填)与道路无缝连接。因此将道路与地形两个三维模型进行无缝的拼合是建立地形与道路的整体三维模型的关键所在,也是道路三维建模的难点。这里将重点建立道路模型整体构建对地形模型的修改[3]。建立整体三维模型的实质是线路三维模型和地形三维模型的叠加。这种叠加可以采用部分地形点重新构网的办法进行处理。线路三维模型和地形三维模型的叠加效果如图3所示。系统总体架构设计如图4所示,包括基础支撑层、平台层、数据层和应用层。基础支撑层,主要为V2X中的MEC/RSU设备和路网运行监测平台,为系统提供动态交通事件信息;车载高精度定位平台,为系统提供车端高精度定位服务。平台层,主要是支撑系统应用运行的平台,包括2D/3DGIS平台和高精度地图服务平台。数据层,主要为高精度地图数据以及车端和平台端应用的3D场景数据。应用层,分为车端和平台端,二者实现统一化应用。系统功能设计主要分两部分功能。车端应用,主要包括图层切换、车辆实时位置、交通事件提醒;平台端应用,主要包括GIS基本操作、车辆历史轨迹、车辆实时位置、交通事件提醒等应用功能。功能结构如图5所示。路侧V2X感知设备动态感知到的交通事件,通过V2X传输协议回传后得到一系列事件属性信息,见表1。本课题将动态交通事件作为一个图层与道路场景进行叠加。V2X的RSU下发的交通事件,一般为点状事件,只需要将获取该事件的经纬度位置(要求经纬度绝对位置达到亚米级),通过GIS引擎坐标点插入功能,将交通事件作为一个独立图标插入到对应位置,并在图标旁边用属性信息框的形式进行交通事件详细信息展现。此外,将事件发生位置坐标与车辆实时坐标进行距离计算,以便为行驶车辆推送交通事件提醒信息。
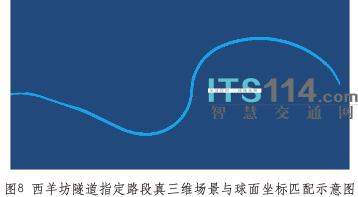
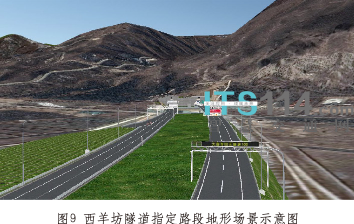
同时,需要根据交通事件的经纬度位置,与高精地图进行动态配准,获取高精度地图对这个经纬度的独特描述方式,主要字段信息见表2。此交通事件的地图信息获取后,可用于后续车辆的长距离路径规划,在路径规划中进行交通事件的避让。对接车机高精定位数据,传输定位数据格式一般遵循通用NMEA-0183协议[4]。延崇高速公路是连接北京城区、延庆新城和河北张北地区的快速交通干道,已于2020年建成通车。延崇高速公路(北京段)工程起点为延庆区大浮坨村西侧,与兴延高速相接,终点于北京市界与延崇高速河北段相接,路线全长约33公里,设计速度80公里/小时,双向四车道。本次实验选取了西羊坊隧道段进行数据采集与制作。全线采用激光雷达采集车进行数据采集。在隧道段采用全站仪控制测量方法,在西羊坊隧道段,共布设了上行26和下行29个控制点的附和导线进行控制,如图6、图7所示,控制测量的导线全长闭合差1.119厘米,相对闭合差1:9033,纵坐标差0.750厘米,横坐标差-0.830厘米,满足导线控制测量精度的要求,本测量的控制点用于激光点云纠正。经过点云数据解算和内业处理,完成了延崇高速全线33公里的高精度地图的加工和生产,数据平面精度达到20厘米。对西羊坊隧道及隧道口以外约5公里路段,进行了真三维场景的制作,如图8所示。真三维场景是基于投影坐标系的平面场景,而在实际使用中地球是球面。因此,重点解决了三维模型与球面坐标的匹配。课题组将三维模型按照500米进行分段处理,通过定位点插入和小角度的旋转,做到了三维模型与球面坐标的完美匹配。另一方面,将正射影像和DEM叠加制作了地形场景,通过supermap平台自带的地形镶嵌和挖洞操作,将真三维道路模型和地形场景进行了融合匹配,如图9所示。
本次实车测试验证,采用了支持隧道内定位车载高精度定位终端和V2X RSU推送的动态交通事件,进行了模型图真实性验证。实验验证表明,本课题组提供的高精度地图与车载高精度定位终端所采集的车辆定位行驶轨迹能够完全匹配,也与V2X RSU推送的动态交通事件位置能够完全匹配,能够满足车路协同的车道级要求。系统应用验证具体包含车载移动端应用和平台端应用。道路参考线、车道中心线、车道线、路面标线、标志标牌、路灯杆、周边附属物等不同结构物的图层显隐。通过与车端高精度定位系统对接,实现在可视化应用中显示当前车辆实时位置,让驾驶员直观看到自己在高速公路上实际位置。通过对接路侧V2X设备感知的交通事件数据,实现在可视化应用中显示交通事件的位置、状态、影响范围。能够动态提醒驾驶员进行避让或小心驾驶。动态交通事件不仅包括点状事件,如事故、遗撒等,也包括面状事件,如雨雪、施工、拥堵等。根据车辆位置和事件位置求距离,并按2公里、1公里、0.5公里分别提醒。平台端应用主要加载高精地图转化后的三维场景模型。GIS基本操作主要包括三维场景的旋转、平移、缩放、漫游等操作。与车端移动端pad实时定位数据保持一致,通过与车端应用系统对接,可在平台端实时显示路上车辆的实时位置。平台端监控人员可以直观了解高速公路上车辆实时位置及高速公路运行状态。车辆历史轨迹功能可提供车辆某一时间段内运行轨迹的回放。在历史轨迹的回放过程中,可进行视角切换、速度控制、暂停/停止等操作。路侧V2X设备感知的交通事件数据,不仅可推送给车端应用,还能上报给监控中心平台端,在可视化应用中显示交通事件的位置、状态、影响范围。平台端交通事件提醒,主要供监控人员及时了解高速公路交通事件分布及实时状态,从而更好地对高速公路运行状态进行干预,及时发布交通路况信息。动态交通事件主要包括点状事件和面状事件。高精度地图在车路协同中的统一化关键技术研究成果,证明高精度地图在车路协同中的作用重大。不仅能够让自动驾驶车辆提前感知前方超视距范围内的动态信息,还能给驾驶员、道路管理者提供可视化的工具,更加便捷地参与交通或管理交通,其对传统高速公路管理方式的革新意义重大。为未来高速公路自动驾驶车辆提供无缝连接的高精度定位服务,提高高速公路运营方在智慧高速运营中的增值服务能力。本研究在高速公路车路协同领域开展前瞻性探索,依托大数据、云计算、先进的通信、监测等信息化手段,利用高精地图实现了车端和路方平台端的统一化应用,有助于车路协同和自动驾驶技术和应用模式的创新与发展,一定程度上提高我国公路使用效率和交通管理服务水平。参考文献
[1] 王刚.谈自动驾驶:从单车智能到车路协同智能的进化[EB/OL].(2018-9-27)[2020-12-01].https://blog.csdn.net/b0Q8cpra539haFS7/article/details/82880934?utm_source=blogxgwz1[2] 智车科技.高精地图在车路协同中的应用[EB/OL].(2019-07-08)[2020-12-01].https://mp.weixin.qq.com/s?src=11×tamp=1594014044&ver=2443&signature=CDjMLPrjvplKhZulGTrCqDaLmreejkYx9T8zVvKgJStSxHubMSxU-O9LE130LCxjb*G1QlxgMOtwbVyuRgvgVYTzmBhpBoQP3vGrByhLKwecw-oN8sYVAET5HGCYQOdb&new=1.[3] 王国锋,许振辉.真三维道路智能设计理论与方法实践[M].北京:人民交通出版社,2003.[4] NMEA-0183协议说明(中文) [DB/OL].(2011-02-14)[2020-12-01].https://wenku.baidu.com/view/3db76601bed5b9f3f90f1cab.html.