基于雷达增强型机器视觉的全息隧道监测预警技术
作者:李斌1,柯巍2,刘盈2,符凯娟2
(1.兰州朗青交通科技公司;2.甘肃新视能科技有限公司)
摘要:高速公路隧道为半封闭环境,较普通路段交通事故多,且极易导致二次事故,造成严重事故损失和交通延误,成为高速公路安全畅通运行的瓶颈。基于传统车检器及视频检测的隧道运行监测手段受硬件和算法的限制,难以达到理想的监测效果。本文依托的研究项目通过毫米波雷达和AI摄像机融合感知的方式,实现隧道全域可视化精准感知,实时准确监测隧道交通运行状态及交通异常事件;并开发了隧道全域三维可视化管理平台,将隧道交通运行态势、交通事件、火灾监测预警等信息整合到一个平台,显著提升隧道运营管理效率。本项目研究成果已在G30连霍高速甘肃省乌鞘岭特长隧道完成部署并示范运行,取得了良好效果。
机器视觉全息感知技术应用研究


图 2 数据标定
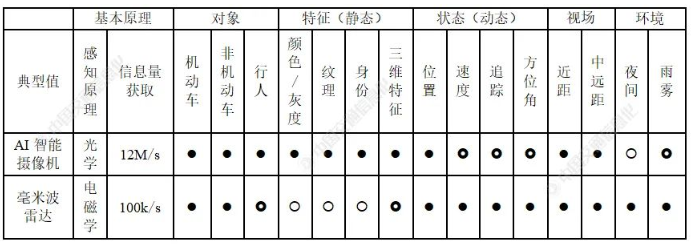
(注:表中符号l代表AI智能摄像机和毫米波雷达对车辆和交通状态典型值具有强烈感知;符号£代表AI智能摄像机和毫米波雷达对车辆和交通状态典型值感知较弱;符号¡代表AI智能摄像机和毫米波雷达对车辆和交通状态没有感知。)


热成像火灾监测预警技术应用研究
表 3 隧道火灾监测项目及指标

技术应用


结束语
(原文刊载于2022年第4期《中国交通信息化》)

延伸阅读!
更多 >>
VIP项目信息
- 黑龙江关于道路运输车辆动态监控社会化服务商备案名单(第十八批)
- ITS114 智能交通市场每周千万项目(6.06-6.12)
- ITS114 智能交通市场500万以下项目(6.06-6.12)
- ITS114 公路信息化市场每周千万项目(6.06-6.12)
- ITS114 安防市场每周千万项目(6.06-6.12)
- IOV114 运输信息化近期招标项目一览(6月NO.1)
- 公路信息化之800万以下中标项目汇总(6.1-6.15)
- 重庆市关于部分道路运输车辆动态监控平台运行情况的通报
- ITS114 智能交通市场每周千万项目(5.30-6.05)
- ITS114 智能交通市场500万以下项目(5.30-6.05)
