交通信号自适应控制技术应用与研讨
一
自适应控制技术发展历程与现状
1978年到2021年,中国的城市面貌发生了翻天覆地的变化。40多年里,中国道路交通信号控制从人工扳动开关到自适应控制、智慧路口,交通信号控制行业在不断的发展。
1978年,我国真正意义上的第一个交通信号自动控制系统在北京前门试点。控制系统的检测设备包括地磁检测器、二次和谐波检测器。1987年,我国自行研制开发的第一个自适应城市交通控制系统,公安部组织研发“七五”国家重点科技攻关项目《城市交通控制系统》,由公安部交通管理科学研究所、同济大学、电子工业部28 研究所、南京市交警支队共同研发,该系统是我国自行研制开发的第一个实时自适应城市交通控制系统。2001年,我国城市交通信号控制系统改革序幕拉开,SMOOTH、线圈车检器等投入试点,运行感应控制。2008年,信号控制机协议标准发布,国家标准《交通信号控制机与上位机间的数据通信协议(GB/T20999 )》正式出台,该标准适用于交通信号控制系统信号机与上位机间的通信,标准的发布,推动了我国信号控制系统的发布。2010年,公安部提出推进、加强“两化”工作,推动了交通信号控制的智能化和互联网+、视频图像处理技术的结合发展。2017年,互联网数据的融入,“互联网+信号控制"项目落地。互联网企业的进入,为行业带来了海量互联网轨迹数据和先进算法。2018年至今,边缘计算的深入应用,推动了智能交通云边端协同,由中心系统的自适应逐渐转向边端自适应。智能交通发展迅猛,车路协同发展的不同阶段正在向高级别发展,智慧城市迎来一轮爆发建设期。
近年来我国自适应系统应用不断的增加,主要城市自适应系统路口数如下图:

有以下几个方面的提升:外场感知技术和建设投入加大,交通状态认知水平提高,点线面不同场景的自适应控制技术应用示范增多,多业务系统的调度能力提高。
二
自适应控制技术
#
(一)交通信号控制技术发展历程
易华录交通信号自适应控制系统以2019年为界进行划分。在2019年以前易华录的交通信号控制平台和控制机以多时段单点控制、多时段的协调控制、感应控制三种控制为主。从2019年开始按照点线面来研究中心自适应控制。2020年,随着车路协同、边缘计算技术的兴起,开始做本地智能自适应控制的一些研究和课题示范。
#
(二)中心自适应控制
易华录自适应控制系统基于从路口侧采集的交通流信息,包括定点卡口数据、接入的互联网数据,并且考虑前端控制方案过渡时间的影响和要求的情况下,以10分钟为最小间隔周期,也就是以10分钟为最小的控制方案自动生成周期,至少每10分钟自动生成一套交通信号配置方案,由中心下发到前端信号机去执行。由中心控制系统根据交通流检测数据(固定检测器、浮动车检测)自动完成交通状态认知、交通控制方案选择和生成、交通控制策略优化。
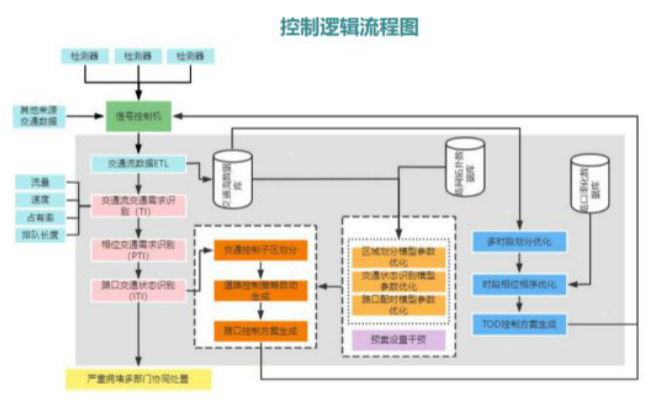
这一控制逻辑图主要有四个控制的技术路线。
第一个是粉色路径,主要是基于固定检测器的数据,包括定点卡口的数据。在路口层基于流量、速度、占有量和排队长度四个传统参数,做到交通量、相位及路口级的交通需求和交通状态的认知。
第二条是蓝色路径,一个信号控制器,尤其是一个自适应控制系统如果要稳健的运行,如果检测数据不可靠,中心通信链路不可靠,中心计算能力不可靠的情况下要有一个稳定的应对方案,国外scats系统里面一般用多时段方案。以前多时段方案都是基于人工的调查经验和分析来做,用自适应控制系统的话基于历史的检测数据,定时地对全规模路网做备用的多时段控制方案的优化和更新。主要优化更新的维度也是以时段进行划分,每个时段的相位向序、具体的配时周期和信号配时的维度。
第三个是是橙色路径,基于交通状态的认知,做交通控制区的划分以及道路控制策略的自动生成。这条路是要用红波、绿波,还是用不对称方向宏观策略的要求,来完成这个路口控制方案的生成。
第四个是黄色路径。基于交通流的积累数据、路网TOP去调整区域划分的一些模型参数,以及交通状态识别模型的参数,以及路口配时模型参数。比如说信号最大周期、最小周期到底多少合适。在以前的应用里一般都基于人工经验,但是这个参数的设置其实会影响控制方案生成的具体数值。现在基于对交通控制效果闭环的分析,来优化控制方案的计算,计算参数模型,来反馈指导整体自适应控制方案的生成。
#
(三)本地自适应控制
本地自适应控制:由边缘计算模块根据交通流检测数据和视频AI解析感知数据,在不依赖中心的情况下,自动完成交叉口交通状态认知、交通控制方案选择和生成、交通控制策略优化。
本地自适应控制目前主要作用:一是分担中心对路口级别精细化计算压力。二是在路口侧就实现了信号控制方案的秒级调整。最关键影响功能就是边缘计算,边缘计算的能力在易华录的技术体系里,一种是可以集成到交通信号控制机的CPU板卡里面去,给原来简单的信号机加了一个智能处理模块,一种是单独一套交通边缘计算软硬件一体机,通俗地叫做“边缘处理盒子”。
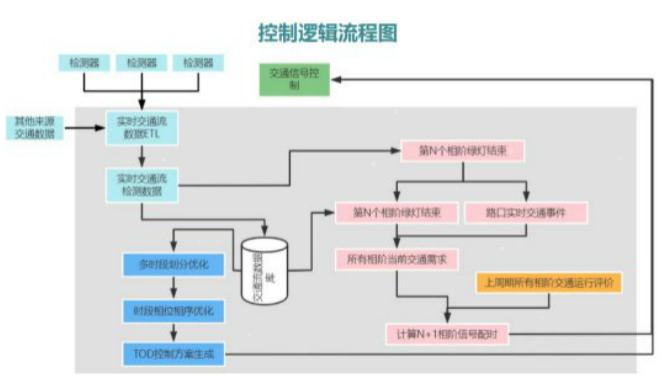
本地自适应控制系统,控制逻辑流程有两个:一是在本地做自适应控制的时候,仍然会面临检测器失效、数据等问题,在本地需要对路口进行固定配时方案,也就是自适应控制系统降级的保障方案来进行优化。二是对每个相接的配置时间进行实时秒级的调整,主要依赖于当前相位的方向交通需求以及下一个相位的方向需求,以及上一轮放行需求当中每个相位放行的结果产生交通状态的影响,这样来生成下一个相位具体的配时时间。
三
中心自适应控制案例分享讨论
路口现状:哈尔滨哈西大街与复旦大街交叉口,路口安装雷达检测器,全天平峰流量适中,高峰流量轻微饱和,原采用TOD控制,全天划分为六个时段,最大周期160s,最小周期90s。
#
1.控制方案分析与设计
路口自适应控制关键参数配置:最大周期配置180s,最小周期配置110s,各相位最大绿灯时间100s,最小绿灯时间15s。全天路口的平均绿灯损失时间减少29%,排队长度缩减16%,等灯次数减少35%。早高峰时,全路口每5分钟辆的通车量在1200辆左右,平峰是1000辆,所以早高峰跟平峰的交通流量差距不大。全白天的交通通行需求还是比较均匀的。轻微的上升幅度是在晚高峰,每5分钟通行量是1400辆左右。
对这个路口做自适应控制系统的时候设置了四大参数,把最大周期设置成180秒,最小周期设置成110秒,每个相位有一个最大绿灯时间100秒,最小绿灯时间15秒,通过这样一个基本控制参数的设置,让它在全天去自动运行自适应控制系统方案。
在实际的控制中,尤其是一些依赖于过多检测数据支撑的一些系统如果要实际应用,就要考虑各种系统不稳定的情况,对于该路口检测状态数据稳定的情况下,在低峰时段,也就是系统识别到交通需求很低的情况下会自动降级为固定配时控制,或者是感应控制。因为中心自适应它采用的四个关键参数,流量、速度、占有率、排车长度,出行平峰时这四个参数几乎为零,所以自适应控制系统基本上是无效的,反而不如感应控制或者固定配时控制更有效。系统自动检测到流量变化较大时,才会切换到自适应控制。此外,如果检测器数据出现异常的时候,超过20分钟检测数据可用率都很低,那么系统自动降级为对应时段的固定配时方案。所以自适应控制真正应用的时候,必须要充分考虑系统跑不下去的时候配时方案降级,以及各种模式之间的自动切换。
#
2.控制方案对比
(1)工作日全天周期运行对比
这是自适应控制系统方案开启前后的运行效果的对比数据,对比的时段是7点到11点。

自适应开启后控制方案运行记录图
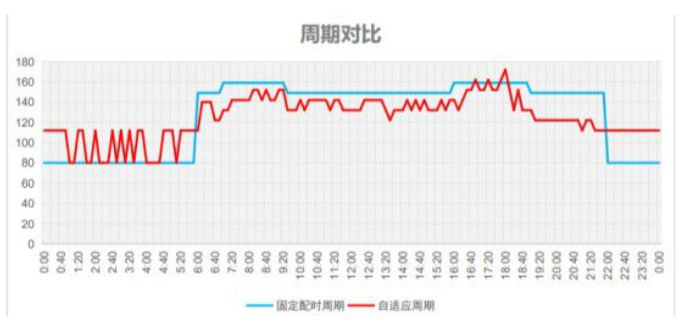
可以看到在自适应控制开启之前时,其配时方案是早高峰160秒,平峰140秒,全天周期不变,各相位时间是稳定不变的。自适应控制系统开启之后,因为方案自动生成的最小间隔时间是10分钟。为什么是10分钟呢?因为在做协调控制的时候,控制方案下发到路口,会存在着方案过渡。如果每分钟、每周期都做信号的实时调整,这是不可能的。因为没有调整到想要的状态,又要换一套新方案,那么这个路口的运行会完全失效。
结果呈现的曲线图,是一段一段的,并不是连续的曲线。每个相位时间是随着交通需求有一些轻微的波动,整体周期白天的波动时间是在130~160秒,全天各时段通行能力平均提升8.58%,在早高峰和晚高峰提升是非常明显的,而夜间基本降级为低峰控制。全天各时段的平均拥堵指数接近11%,平均延误下降33.76%。
另外,在自适应控制开启之前,因为多时段控制方案比较僵硬,若是基于此做交通信号优化,划6个时段已经是比较用心了,如果要划到12、24个时段,需要很高的人工成本,也没有必要。多时段方案在实际常态控制里还是比较僵硬的。会看到它有很多突发的波动,延误的波动,就是因为交通流一些突发波动性在多时段范围内无法应对,会造成很多突发的交通延误波动。启动自适应控制系统控制之后,这样一些突发波动仍然有,但是相对来讲少了很多。整个全天延误波动相对来说变得比较平缓。因为控制方案在跟着交通需求做一定的自适应控制系统控制变化。直行的排队长度平均每个方向下降了20%左右,左转排队长度变化下降30%以上,比较明显。
(2)通行能力对比,全天平均各时段通行能力提升8.58%(夜间自动降为低峰控制通行能力相当)。
(3)全天拥堵指数对比(全天平均各时段拥堵指数下降10.93%)
(4)延误时间对比(全天平均各时段延误时间下降33.76%)
四
案例感受与总结
#
1.自适应控制投入是长期的
自适应控制系统投入期很长。包括新建设成本、旧改造成本、长期维护成本。前期阶段要新建设一些信号机、智能检测器,还要对旧的进行改造,主要是对现有定点卡口系统。由于很多定点卡口系统原来建设的时候,并不是给交通信号用的,配置参数不能精准识别到哪一个车道对应着哪一个交通流进行结构化系统自动匹配,需要人一点点梳理,包括接口之间的打通。此外,需要长期的维护成本,因为自适应控制系统完全依赖于数据,必须要让这些检测数据、检测环境长期、有效、稳定地运行,长期投入维护成本,才能够让自适应控制系统跑起来。
#
2.自适应控制不是万能的
(1)不需要全部控制维度去做统一的自适应控制。控制子区、干道、协调周期,相位差和绿信比,并不需要每5分钟、10分钟、每秒都变化,有的每周变化一次就可以了,有的两三个小时变化一次,多维度在不同的频率里做自适应控制系统其实是最有效的。
(2)不能覆盖全部的交通状态。从刚才选择的交通路口,能够感受到这种比较简单的自适应控制,核心的原理其实是在调整路口不同的通行能力分配的失衡。对于严重的过饱和、超饱和的路口,已经没有多余的通行能力(时间空间)去分配了。这时自适应控制系统基本上是失效的,必须结合更大规模的空间去统一调控。如果交通需求低,处于夜间的低峰状态,基本上没有交通流参数,怎么自动计算拴生成控制方案呢?
(3)不统一全部厂商标准。最近两年比较火的就是统一信控平台。这个概念在实际的应用过程中首先就面临着不同厂家,通信协议,数据格式,控制方案接口等等这些标准的统一难题。另外一个难题可能很少人思考过,现在每个厂商的自适应控制技术路线是不一样的,多时段控制方案、感应控制方案相对来说是比较标准的,比如易华录是那样的,海信、莱斯、杰瑞又是这样的。如果要建立一个统一的平台去生成自适应控制方案,那么统一平台的自适应控制技术体系肯定又是不一样的。这样一个统一的信控平台必然会让各厂家自适应控制能力的优势丧失,而且控制方案也不一定能够跟上层的平台做适配。所以目前统一不同品牌自适应控制难度还是非常大的。
(4)较少不面向全体参与者,目前自适应控制还是很少,并不面向全部参与者。网联也好,车牌识别也好其实都是面向机动车,较少考虑非机动车和行人。非机动车的治理信号配时的精细化控制,更多还是要靠人工,以及政策的辅助。
所以自适应控制并不是万能的。
#
3.自适应控制不是严格必要的
城市选择自适应控制的时候需要考虑一下性价比的问题。交通流的时空管控手段是多样的,不要妄想说上一套自适应控制系统或者说哪一套系统就能把交通拥堵全部解决;自适应控制可以是非常简单的,但也可以非常精细和复杂的。这条路非常枯燥,从实际应用的角度,不是最优控制或者是什么控制为目标,只是要从整个工程到实际,以最有效的控制为目标,去不断踏实的努力前行。

