基于PWM的可调光移动式太阳能道路交通信号控制系统的设计
引 言
可调光移动式太阳能道路交通信号控制系统无需架设电力电缆专线,具有便捷、节能等特点,在市电道路交通信号控制系统施工建设、故障维修或电力故障等情况时,能有效接替市电道路交通信号控制系统进行交通指挥和疏导,释放城市警力资源,支持交通管理的无缝衔接,还能布设在学校、工厂等没有交通信号控制装备的路段,解决特殊场景下的交通管理。目前市场上太阳能道路交通信号控制设备种类不少,但大多存在功能较为单一、续航能力弱、移动不方便、人机交互不友好等问题[1-2]。本文针对上述问题,设计了一种基于微处理器和PWM的可调光移动式太阳能道路交通信号控制系统,突破了电动推杆自动升降控制、安全便携拖挂移动和多时段PWM可调光控制等关键技术,有效实现了多时段自动配时、多场景特勤可控、显示亮度灵活可调等多功能,并通过无线手持终端提供灵活的交互控制能力[3-4]。
1系统总体设计
本文设计的可调光移动式太阳能道路交通信号控制系统共包含移动基座、供电装置、自动升降装置、显示灯箱、道路交通信号控制机、手持终端共六个功能部件,其组成如图1所示,各部件设计思路和组成如下:
1)移动基座:主要实现便携式移动、牢固安全伫立。移动基座功能组件主要包括牵引装置、伫立千斤顶和基座结构件。其中,牵引装置包括带导向轮的千斤顶、拖车球锁;基座结构件包括2个充气轮、1个轮轴、2个减震器及箱体结构件。同时,移动基座的箱体为供电装置和自动升降装置提供安装空间。
2)供电装置:为系统提供太阳能输入,并具备欠压、过流等自身保护功能。供电装置功能组件主要包括太阳能组件、充放电控制器、蓄电池和蓄电池充电器,安装于移动基座的箱体内。其中,蓄电池充电器还提供有AC220V接口,可接入市电实现系统快速储电,满足阴雨天气情况下等急需使用的特殊情况。
3)自动升降装置:主要用来调节显示灯箱高度,并通过升降限位设计防止电机受损。自动升降装置功能组件主要包括电动推杆、电动推杆控制装置,安装于移动基座的箱体上。
4)显示灯箱:通过法兰安装在自动升降装置的电动推杆上,接收道路交通信号控制机的输出信号,进行信号灯不同状态显示,实现对道路交通流的指挥和疏导。显示灯箱功能组件主要包括灯箱结构件、信号灯显示单元。同时,显示灯箱为道路交通信号控制机提供安装空间。
5)道路交通信号控制机:是系统的信号控制中枢,接收手持终端无线控制信号,控制显示灯箱的信号灯显示单元状态输出,安装于显示灯箱内。
6)手持终端:为系统的人机交互装置,提供道路交通信号控制机多时段信号配时、调光等运行参数设置,及特勤控制、参数查询等功能,通过无线方式向道路交通信号控制机输出控制信号。
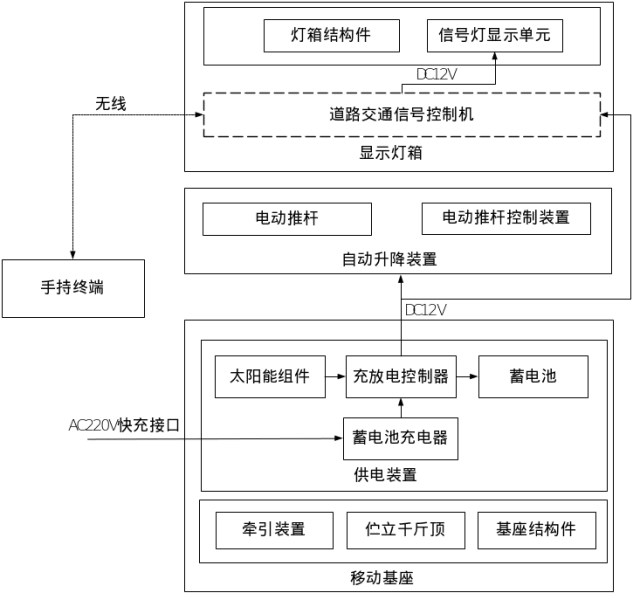
图1系统组成示意图
2主要部件设计
2.1显示灯箱设计
本研究显示灯箱采用单开门设计,内嵌12个Φ300信号灯显示单元。考虑运行于室外环境,故门框、箱门进行了防水设计,达到IP65防水要求;同时为确保灯箱与升降装置连接的安全和可靠,进行箱体总重和厚度的优化设计;并在箱体底部四个角落设计有漏水孔,便于箱体内水汽有效挥发,确保箱体内环境满足设备运行要求;为确保整个系统在拖挂移动过程中箱体晃动影响升降装置安全,在箱体底部四角外侧设计有锁环,实现整个系统拖挂移动过程中用钢丝绳将箱体与底座四角的软固定。
2.2信号控制机设计
信号控制机采用壁挂式安装模式及插拔式信号连接方式安装于显示灯箱内,其内部电路板采用导轨式固定模式,保证安装的便捷、牢固;作为系统信号控制中枢,主要接收手持终端无线控制信号,进行解析、完成信号机运行参数的存储和按预设置的运行参数对显示单元的信号灯进行状态控制和调光控制[5],其功能框图如图2所示。

图2道路交通信号控制机功能框图
本研究信号控制机标配6路道路交通信号灯驱动输出信号,可扩展至12路。其中,每路驱动输出信号采用先进行光耦隔离,再通过三极管实现低电平通断控制显示单元的信号灯亮灭,提高系统稳定性、可靠性和抗干扰能力。PWM调光部分采用高速光耦隔离后经三极管输出,提高调光信号传输能力。
2.3手持终端设计
手持终端作为系统人机交互、运行设置、特勤控制和参数查询等功能部件,功能视图见图3,设计分解为液晶显示屏、按键面板、控制板和壳体四个组件。

图3系统手持终端软件功能视图
1)液晶显示屏:本研究通过背光休眠模式来降低液晶显示屏背光亮度,达到降低功耗效果,提高手持终端的续航能力。
2)按键面板:主要支持人机交互。为保证人机交互的友好性,本研究重点从壳体、外形尺寸、材质、造型、按键布局、操控手感等各角度进行了设计,手持终端操控按键布局如图4所示,其中按键功能定义和布局结合了交叉路口道路交通信号灯标准布局模式,确保视觉感官和操控动作对应友好性。同时,在综合考虑空间、布局和功能的前提下,部分按键设计为复合按键,既满足了需求,又节省了空间和材料,简化了硬件设计。

图4系统手持终端操控按键布局图
3)控制板:控制板为手持终端的核心组件,主要进行人机交互响应。本研究控制板上微处理器配置有64KB的ISP FLASH、4KB的RAM、WDT、4个Timers、1个USB控制传输单元、3个Port接口、2个UART接口、1个SPI接口和1个10位的ADC单元,用于支持特勤控制、多时段PWM调光控制、信号配时等运行参数的指令发送;设计有无线通信模块支持与信号控制机进行近距离无线通信;设计有RS232和USB接口,方便外接调试线缆为系统调试、运维等提供通信和供电[6]。
3关键技术实现
系统为实现多时段自动配时、多场景特勤可控、显示亮度灵活可调等功能,及灵活交互控制能力,重点突破电动推杆自动升降控制、便携式拖挂移动实现和多时段PWM调光控制等关键技术。
3.1电动推杆自动升降控制技术
目前市场上的太阳能道路交通信号控制系统普遍使用固定式或手动摇臂式灯箱立杆,存在使用局限或使用不便的问题。本系统将显示灯箱立杆设计为电动推杆,采用“升”、“空”、“降”3档钮子开关实现灯箱高度自动升降调节:一是在移动过程,为避免发生倾倒或推杆折损,灯箱高度可进行“降”调节至2.6米,确保系统转移安全;二是在系统工作时,为方便看到信号灯显示单元,灯箱高度可进行“升”调节至3.7米,确保大视线被观察范围;三是电动推杆升降动作执行完毕,为确保系统自身安全,系统应回位至“空”档位处。
系统自动升降装置的电动推杆升降控制原理如图5所示。该控制电路中要求限位开关应为常闭模式,在电动推杆上、下端设定的自动停止的感应区域各设计一个限位开关,当电动推杆达到设定的高度位置时限位开关自动断开,电机自动停止工作、升降控制开关回位至“空”档位处。
功率继电器闭合瞬间其线圈的电流远大于限位开关的极限电流值,会导致电动推杆控制失灵的安全问题。为解决这种同一回路工作电流不匹配的情况,本系统利用场效应管输入端小电流控制大负载的工作原理,在该控制回路中增加一个场效应管的方式来解决该问题。经系统调试和测试,自动升降控制回路电流及相关参数的各项指标满足设计要求。
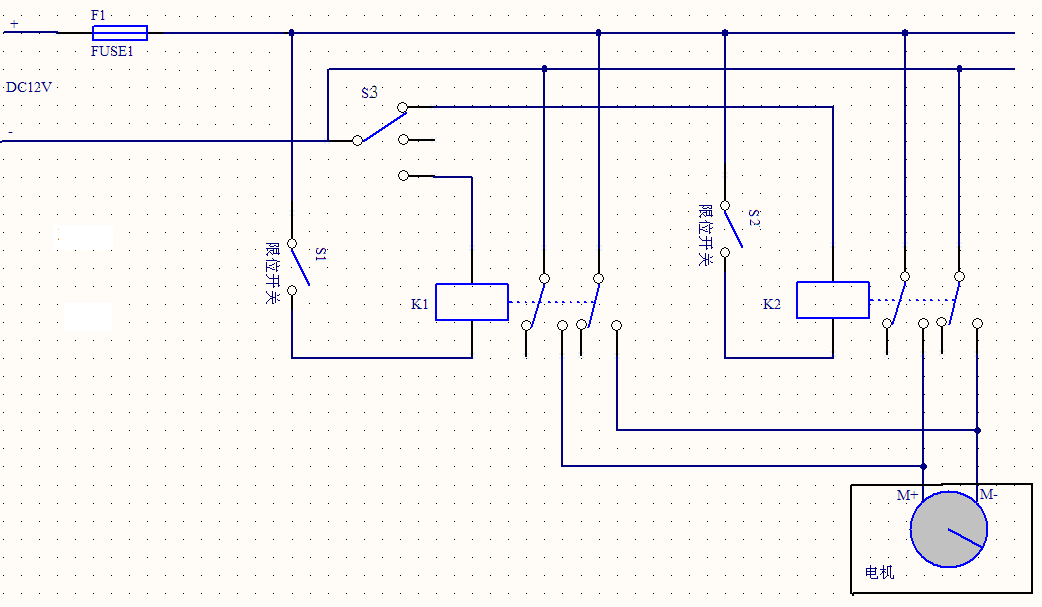
图5系统电动推杆升降控制原理示意图
3.2安全便携拖挂移动实现方法
针对系统牢固安全伫立、便捷移动等使用需求,系统重点研究了移动基座的具体实现,主要从伫立/移动安全、移动便捷两方面实现:
1)伫立/移动安全实现方法
移动基座总体布局、轮胎选型、轮毂直径、伫立千斤顶都会影响系统伫立/移动安全,本系统具体实现为:
移动基座总体布局直接决定伫立/移动是否稳定。考虑移动基座是系统(除手持终端)的承重平台,承载了移动基座自身、自动升降装置、显示灯箱、道路交通信号控制机,及内部安装的供电装置,因此综合考虑伫立/移动稳定性、信号灯显示单元观测高低范围等因素,将系统(除手持终端)重心设计在轮轴靠牵引杠的一侧,控制其重心在轮子、导向千斤顶支撑点形成的平面内,并设计伫立千斤顶高度可调,从而多角度解决系统伫立/移动时的稳固性。
轮胎选型和轮毂直径直接影响系统伫立/移动稳定性、移动减震性、信号灯显示单元观测高低范围。在轮胎选型时,本系统综合了移动部件重量、移动速度需求、道路路面情况、轮胎断面等因素;在轮毂直径确定时,为防止移动组件移动过程中颠震、惯性引起的倾斜,本系统先计算灯箱顶端离地面距离高度最佳控制值,从而确定轮毂直径。
伫立千斤顶直接影响系统伫立稳定性。本系统通过4个伫立千斤顶分立移动基座两侧的设计,支持高度可调节、大面积接触地面,使其在系统伫立时处于水平、稳定平面,达到系统稳定伫立效果,且能使轮胎在伫立时不受力,保护轮胎。
2)移动便捷实现方法
本系统设计的牵引装置在整个系统位置调整时,仅需一人操作就能进行安装、拆卸。通过牵引装置上的导向轮千斤顶和拖车球锁牵引杠设计,实现一端通过插销与移动基座轻便连接,另一端通过拖车球锁和牵引机动车上的拖车球牢固连接。通过牵引装置将移动基座和牵引机动车牢固连接后,牵引装置上的千斤顶的导向轮和伫立千斤顶均可以插销方式快速折叠收起,从而实现系统移动便捷性。
本系统移动基座结构和布局如图6所示,本系统的轮胎、轮毂设计为8英寸轮毂的充气轮胎;可满足不少于250公斤的承重,以及在城市道路不低于40Km/h速度的安全拖挂移动。
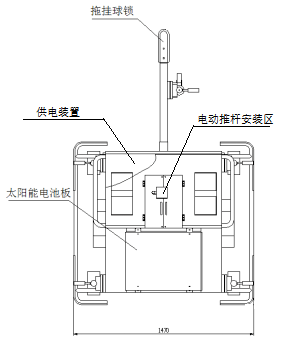
(a)系统移动基座布局示意图
(b)系统移动基座结构示意图
图6系统移动基座布局和结构示意图
3.3多时段PWM调光控制技术
续航能力是衡量太阳能道路交通信号控制系统性能优劣的重要指标。本系统主要耗电单元为显示灯箱功能组件中的信号灯显示单元,为充分降低其功耗,考虑到季节昼夜时长、日照强度差异对信号灯显示单元正常使用时亮度需求是有差异的,因此采用多时段PWM调光控制实现显示单元亮度可调控,达到降低系统功耗、提高续航能力的目的,具体实现步骤为:
1)道路交通信号控制机自动获取其微处理器中ISP FLASH内时段、亮度等级调光控制参数;
2)由道路交通信号控制机微处理器中PCA功能单元的资源生成PWM输出信号DIM_CTR;
3)DIM_CTR信号再经道路交通信号控制机设计的光耦隔离和三极管驱动电路进行信号隔离、增强,向显示灯箱功能组件中的信号灯显示单元输出经隔离、增强的亮度控制信号;
4)亮度控制信号作为信号灯显示单元中恒流驱动芯片PT4115的DIM端输入信号,DIM端为该恒流驱动芯片的调光控制信号输入端,可通过接收外部提供的亮度控制信号来调节恒流驱动输出的电流值。恒流驱动输出的最大平均电流由连接在VIN和CSN两端的电阻RS决定,如图4所示。
5)通过在DIM端输入可变占空比的PWM信号调节输出电流大小以实现对信号灯显示单元进行亮度调控,计算方法为:
(1)
PWM可调光电路图原理如图7所示。
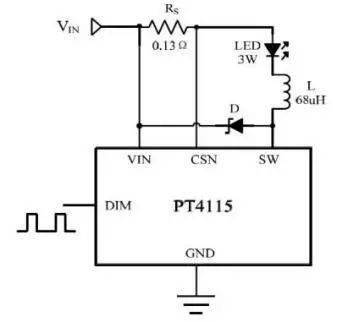
图7 PT4115驱动芯片PWM调光电路
4运行验证
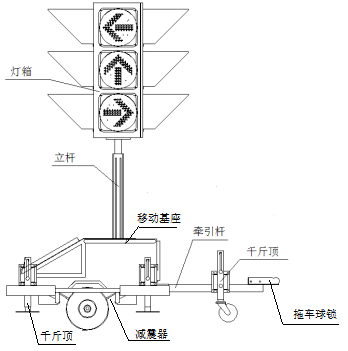
基于总体设计、部件设计和关键技术实现等,本研究研制了可调光移动式太阳能道路交通信号控制系统,如图8所示。通过道路交叉路口运行验证,系统能实现全天10个时段、四级(100%、75%、50%和35%)调光控制,有效地使信号灯显示单元日照时间长的季节、光线充足的白天时间段工作在高亮度等级状态,及日照时间短的季节、光线不足的傍晚及夜晚运行在低亮度等级状态,保障可视效果较好的情况下,从而降低了系统功耗、提升了续航能力,比一直运行在单一亮度等级情况下续航力提高了2-3倍。同时改善了系统转移方式,可满足系统在市区道路拖挂式便捷、安全转移,支持40Km距离范围内1小时转移就位。

图8可调光移动式太阳能道路交通信号控制系统物理视图
5结束语
本研究设计的基于微处理器和脉宽调制可调光移动式太阳能道路交通信号控制系统,具有人机友好、功能完备、移动便捷安全等特点,达到了系统高可靠性的指标,可广泛应用于市电道路交通信号控制系统施工建设、故障维修或电力故障等场景,能有效接替市电道路交通信号控制系统实现道路交叉路口交通流管理的无缝衔接。
参考文献:[1]周雅玲.城市交通信号控制方法综述[J].东南大学学报,2015年第S1期.
[2]柴干,赵倩,蒋珉.城市智能交通信号控制系统的设计与开发[J].浙江大学学报(工学版),2010年,第44卷 第7期.
[3]王琳,吴高峰.一种提高电子设备振动环境适应性的优化设计[J].工业控制计算机,2018年第31卷第1期.
[4]杨光友,朱宏辉.单片微型计算机原理及接口技术[M].中国水利水电出版社,2002年2月.
[5]田冠枝,黄玉平,司宾强.新型PWM波故障保护与诊断电路设计[J].电子测量技术,2015,38(9):125-127,134.
[6]王长峰,于婷.智能车数据无线通信模块设计[J].现代机械,2015(1):77-79.
作者:曾艳萍 连云港杰瑞电子有限公司
本文刊载于《智慧交通》杂志电子刊2023年上半年刊。

延伸阅读!
VIP项目信息
- 宁德古田县2023年500路公共安全视频监控建设及电子警察升级改造项目招标预告 1992万
- 宁波慈溪杭湾金融港交通安全设施及智能交通设施施工招标计划 5200万
- 北京通州区国道230(K13+114.628-K15+276.539)道路工程-交通工程招标计划 1400万
- ITS114 智能交通市场每周千万项目(9.11-9.17)
- ITS114 智能交通市场500万以下项目(9.11-9.17)
- ITS114 公路信息化市场每周千万项目(9.11-9.17)
- IOV114 运输信息化近期招标项目一览(9月NO.2)
- ITS114 安防市场每周千万项目(9.11-9.17)
- 磨憨经济合作区交通科技管控设备及智慧办案设备招标计划 3315万
- 盐城滨海县公安局为民办实事农村道路交通安全提升工程招标计划 1967万
