大咖谈|关于Barrier、时距图、感应控制的一些讨论
本文整理自微信群“交通信号控制论坛”,讨论起源为11月10日,辛武平博士引用了一段文献,引发对barrier、时距图的讨论,并延伸至环岛交通信号控制、感应控制等话题。因讨论内容过多,ITS114将其分为三部分推送,第一部分为Barrier、Ring-Barrier以及感应控制的三大原则,第二部分为时距图、绿波与协调控制,第三部分为环岛交通信号控制及完全感应控制。未经所有讨论老师审核,如有错漏敬请谅解。希望对信控行业的从业者有所帮助。
Barrier、Ring-Barrier以及感应控制的三大原则
田宗忠教授:德国和西欧一些国家没有barrier的概念。为什么非要纠结barrier的做法?
张福生老师:欧洲的标准中也涉及一个phase在stage中如何结束的问题,通常包括跟随某一个相关phase解释,跟随stage结束等四种情况。
王小刚老师:我觉得barrier是个初级概念,有助于理解标准的环结构。如果是异形交叉口的控制,可能找不出barrier,或者虚拟的barrier两侧的相位是可以concurrence的,那么前面的论述就有问题了。
戴高:是的,不允许合流冲突。一个一刀切的标准,省的过于灵活实用,得乱。
张福生老师:@王小刚自上而下看(从应用场景上看)确实可以没有barrier;但是,自下而上看(从环结构模型的严谨概念看)还是要有barrier,至于跨越barrier的应用需求,可以用别的方法实现。这恰恰是phaseinstage与phase-ring结构的差异。
杨斐:@王小刚 比如这种错位十字路口的放行方式,两个原来可以并发的左转1、5是冲突的,通过特殊扩展,仍是可以找到barrier的,只不过蓝色barrier结束后,相位6换个马甲继续运行,不会结束绿灯。

戴高:Barrier之后可以再出现,等于没有,或者叫STAGE。
杨斐:底层上仍然是std8,并没有违反环结构定义。复杂路口仍可以嵌套环结构,只是各信号机厂家各显神通罢了。
杨斐:@戴高虚拟barrier。
戴高:变种之后啥都可以,一个stage,一个barrier,结果回到以前起点,你能干的我也能,皆大欢喜。
辛武平博士:Barrier是一个conceptual “join”point,ring-barrier实际上是一个并行join-fork的数据结构。ring-barrier隐式定义了conflict matrix和concurrency group。从执行的角度,信号机在启动新相位的时候,需要解决三个问题:
1)新相位不能与正在执行的相位冲突;
2)如果存在多个calling phases,先启动那个?
3)对于没有call,但compatible的相位,如何决定启动的顺序?
所以,抛开那些眼花缭乱、令人不见森林只见树木的各种参数,以一种topdown的大局观来看ring-barrier结构,你就会发现,它实际上完美解决了上面三个问题。
辛武平博士:我把它归结为设计感应控制的三大哲学原则:
1)“下一个”相位必须与正在执行相位兼容,此为安全原则;
2)下一个”相位的选择,要基于某种顺序规则,在多个呼叫相位中“及时”/just in time动态选择——此为效率原则;
3)在不冲突的前提下,给予路给尽可能多车流—此为共惠原则。
现在回过头来在看ring-barrierstructure,不就是一种有效的数据结构,体现了上面三大原则吗?Dualentry,greenrest,greentransfer,conditional service/reservice,体现的就是“共惠”原则。
站在基本原则的角度,你会发现,不论是NEMA,VA-PLUS,感应控制的设计,都跳不出这样的topdown design,这些最基本、最元素的设计格局。没有例外!
你还会为stagecontrol,NEMAringbarrier这类“皮相”层次的概念纠结,并争论不休吗?你还会不见森林,只见树木,为各种参数的细枝末节并沾沾自喜吗?不会了!!
感应控制的topdown design view大局观,就是相位这个控制元素的“生死观”,“the life and death”of phases,就是相位在detector calls/controller recalls的敲打下,在协调的约束下,如何在安全、有效、共惠的原则下,启动、延长、结束的问题。
请大家再读一遍这三大原则。你就会发现,感应控制,就像一个能在混沌中,根据基本原则自我演变的三体系统,一花一世界,一叶一菩提,小混沌下有大周期。有动心起念(call),有生灭转合(activation,extension,termination),有聚散离别,有生死相依。
祝大家研究感应控制,都有自己的心得、法喜、和禅悦。能在一片混沌中,发现让自己满意的“道”,体会”感应控制之禅意”,和Eureka的光辉时刻。
体现的就present green indication to as many compatible phases as possible, even without active demand。设计感应控制,三大基本原则就够了,那些林林总总的参数,没有一个不是围着这三大原则设计的。
交通工程师设计一个信号方案,他/她就是相位生命的参与者、观察者,思考者、设计者。
一个优秀的交通工程师,需要有大局观和超越皮相的相位生死观。
王小刚老师:@辛武平 其实环的三大原则,15年前在北京燕京饭店我就表达过观点:
一,环是执行的序列,可以跳不能换。
二,环在barrier两侧要同时结束。
三,环结构不能临时更改,复位不能改变环结构。
基于这三点,我觉得环是有缺陷的,事实也证明如此。我自己也编码,后来觉得不改良设计,ring就是节育环了。当年Eagle signal进北京市场时,没有一个人讲明白四环应该怎么玩,后来我们用一堆虚拟相位,空相位打了个圆场。好在phase跟channel的对应关系,允许空输出,不然不知道如何解释先进性。
辛武平博士:确切地说,环有两个语意:一是preferredorder,实际上是一种priorityrule,二是同时隐式定义了conflict(环上各相位是不兼容的)。
辛武平博士:不要就环谈环。从那三个原则出发,工程师会怎么设计?VS-PLUS是一种落实,RingBarrier也是一种落实。所以从原则出发,如何解决conflict?如何解决priorityorder?如何保证coordination-ring barrier是一种落实?
王小刚老师:嗯,我同意,首先要有统一的规则,然后要Exception to the rule。现在也一样,规则有了,规则之外的指导太少了。那也可以这样说,三环和四环是依附关系,通过overlap和傀儡相位去跨越,难道后面就不是环?
辛武平博士:这些问题,深入思考的信号机开发者一定会想到。我的体会是,在学习理解各种参数的时候,在设计层面把握好大局观,就不会困惑、混淆、迷失了。落实到具体的实现,是从理念到具体的过程。
王小刚老师:通过几个必须的四环控制,而不是秀技,就有点迷茫了。
辛武平博士:需要注意,环不是独立的,从来不是!环之间的联系,是通过barrier建立的,建立的结果,就是concurrency group。Concurrency group不但是conflict,也是执行层面的time slice,更是排序呼叫相位的的数据结构。
辛武平博士:再说一遍-ring-barrier结构,是一种并行执行的join-fork数据结构。
王小刚老师:双环是标准的数据结构,是互斥和共存的关系。然而,标准化的背后其实也有很多毛病,我觉得不适用与复杂的控制,复杂控制用stage更简明。
辛武平博士:从Technicalities的角度来看,环当然是可以换的。发展了几十年,现在能想到的需求,前人也早就想到啦。当前,环是可以动态转换的。我不是在辩护ring-barrier的“优越性”,而是在尽力找寻朴素的基本原则,劈开混沌,拨云见日,来清晰理解和驱动各种参数设计。比如,Dualentry为什么要有这么一个设计,到底体现了什么原则。在基本的原则之下,NEMA和VS-PLUS具体实现了什么殊途同归的技术路线,是我真正探寻的终点所在。
王小刚老师:我觉得感应+协调,包括公交优先,不引入windows的概念,基本就完了。交通信号控制现在有两个误区,一是不管车道分布画时距图,二是共用周期的禁锢,最小公倍数也好,数据驱动也好,及时响应也罢……
辛武平博士:Windows(permissive window etc)的概念的本质,是启动相位的排序机制。不叫“windows”,也一定会有一个类似的机制,这是跑不掉的设计。
李克平教授:据我对VS-Plus的一点点理解,经典的VS-Plus是属于Signal-Group based的控制方法(据说VS-Plus可以emulate双环结构,那个另当别论),而双环结构应该属于强约束型的Stage based的控制方法,这是两类完全不同的控制方法,几乎是水火不容!
田宗忠教授:@李克平 除了barrier的强制结束,两者没有太大的区别。通过使用overlap,这种强制也淡漠了。只不过过于复杂的交叉口和多模式控制,Ring-Barrier做起来比较复杂。
辛武平博士:控制方法是不一样,是technicalities层面的技术细节。但控制原则是一样的,比如,NEMA dualentry规则,体现的是present green indication to as many compatible movements as possible, even without demand基本原则。在VS-PLUS上,就是类似的在启动新的signal group的时候,同样有一套找寻compatible signal group的规则和方法。
“殊途同归”说的就是这个意思。
还有,在执行层面,coordination就是确保协调相位在本地周期的固定窗口执行。对应这个需求,NEMA和VS-PLUS都各自有自己的一套做法,但本质上都是permissive window的令牌环机制。
叫法迥异,殊途同归。就是我努力想要说的是,设计原则的一致性,落实到实现执行的多样性,继而带来控制参数的纠葛性。拔藤割蔓,找到感应控制的朴素本心,就不用纠结到底是NEMA,VA-PLUS还是其他什么框架了,“凡所有相,皆是虚妄”。那些名目繁多的参数,是皮相,不是本质。诸相非相,所有参数都消失了,就看到感应控制的本质。
时距图、绿波与协调控制
王小刚老师:绿波要突破两个禁锢,一是共用周期,二是现在的时距图画法简直就不可接受。
还有一点,绿波应该是附属产品,而不是为了绿波而绿波。当绿波是主要指标的时候,其他指标的下降,完全可以抵消带来的收益。此外,绿波和控制器的结合,好像没看到合理的相位差算法。
戴高:时距图的画法简直就不可接受。有存车时,不能很好画出绿灯开启时存量消耗时间。
辛武平博士:我不认同”时距图的画法”不可接受。首先要明确———“绿波”究竟是一个设计元素,还是动态控制元素。现在谈绿波,就把“设计”和“动态”控制混在一起,这不好。如果是“绿波设计”,那是针对稳态交通流的设计方案,时距图是这个设计的组成部分,有更好的方法吗?没有。
如果是针对实时交通流,涉及控制参数(比如offset)实时调整的动态控制方案,就一定要把上下文说清楚。时距图是针对稳态交通流的信号控制设计方案。实际效果跟实时交通流与稳态设计交通流的偏差。时距图对实时交通流来说,是BGM,是背景板,是参考图。
评价协调设计方案,首先看时距图,其次看动态指标。二者的上下文完全不一样。
辛武平博士:时距图是针对“稳态交通流”的信号控制的设计方案的一种图形展现。实际运行效果,跟“实时交通流”与“稳态设计交通流”的偏差有关系。
田宗忠教授:可以这么形容——仅仅绿波宽最大并不一定是最好方案。但如果没有绿波那一般就是不好的方案。就是“没有最好,只有最差”。无论是固定配时下的协调,还是感应下的协调,都离不开从绿波开始。绿波也包括全路段和部分路段两种,设计时可以没有整个路段的和绿波,但交叉口之间一定要有。
王小刚老师:现在的时距图,就是一个笑话。只要谁说协调控制要共用周期,找关键路口等,就可以判断他还没入门,水平不咋滴。
辛武平博士:Acyclicsignal operation完全没有背景周期,也可以协调信号的绿灯窗口,来保证车队组团通过。不过,这应该基本是自适应控制的范畴了。
李克平教授:“绿波”是个概念,并非画两条线就是“绿波”!但似乎没有这两条线,又不容易说清楚“绿波”!
刘伟教授:好久没看到这么精彩的讨论了,最近一直在思考信号控制效果的评价和信号控制方案的评价,今天的讨论给我的启发很大。
戴高:这个问题以前也聊过,没法很好解决。按绿尾协调来,绿波带宽有就有,没有就没有,不大可能按实际动态滞留队列的清空时间,来画出不同颜色的清空绿灯段,以体现准确协调情况。工具嘛,没有很理想的。
李克平教授:“绿波”控制,应该:
1、必须保证交叉口所有交通流的理论上的安全性;
2、让主流向的车辆不停车/少停车通过多个交叉口;
3、不能因此对交叉口的整体通行效率和对其他方向的交通流产生过度的负面影响。
辛武平博士:是啊,绿波不是两条线。时距图,是稳态交通流控制的设计工具,也是设计结果。是设计者的”愿景”模版。绿波是信号控制系统,在“模版”之上的实际效果。
蒋建明:小刚总说的这个问题,我个人是这样理解的:从信号控制手段来说,有动态控制模式(所谓的智能信号控制)和静态控制模式(固定周期)两种,动态协调控制模式下的协调关联路口之间的共周期性,在某个时段的数个控制周期时长内,各路口间的每个单次周期时长极有可能出现不绝对相同的情况,但若干个周期内的总时长一定会相同,平均周期时长也一定是趋近相同。例如A、B相连两个路口在动态协调控制模式下可能出现的场景是:A路口上一个周期运行了98秒,当前周期运行了104秒,而B路口上个周期运行了105秒,当前周期运行了97秒。在这两个周期中,这两个路口的周期时长看似互不相同,但两个周期的总时长是相等的,两个周期的平均时长均为101秒;对于静态协调控制模式下,共周期就是无法摆脱的魔咒。
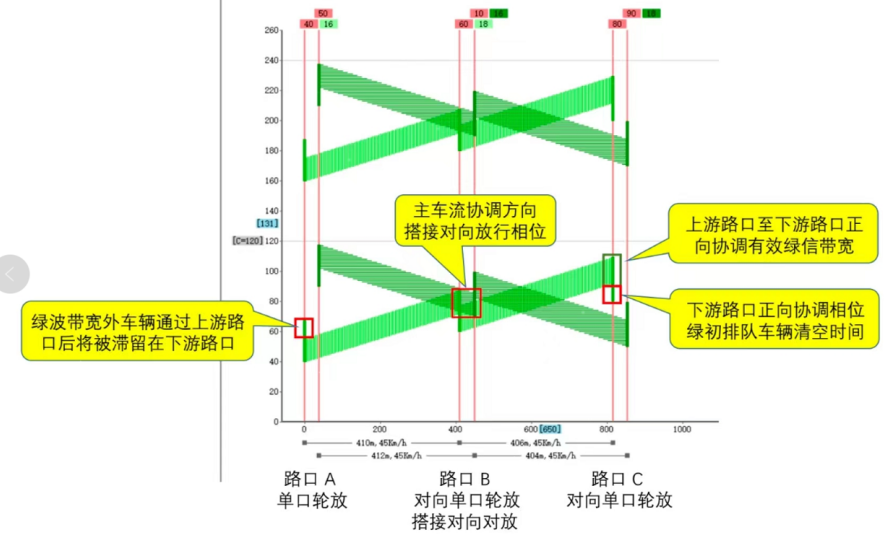
对于某些设计者画出的静态协调(绿波)控制时距图没法看的问题,这个也的确不少见,主要存在的问题是做出来的绿波设计,只是按照设计绿波车速和路口间距,计算出了上下游路口的相位差,没有考虑下游路口红灯期间,排队车辆从绿初时刻到这部分排队车辆清空所需要的时间,这样的时距图自然只能被看成是孩童的涂鸦作品。
辛武平博士:@蒋建明 很有洞察力,“平均周期会趋同”太赞了,蒋老师说的真好。这个洞察的本质,就是非线性系统在一定条件下展现分岔、周期运动与非周期运动相互纠缠,混沌中的有序。时距图其实是稳态交通流的时空收敛点。也就是说,acyclic的动态控制系统,拉长时间线后会渐近收敛为周期系统。
蒋建明:不管是动态还是稳态,红灯期间一定会有等待绿灯信号的排队车辆,只是不同时段交通需求不同,排队车辆的平均值也不同。这些红灯期间的排队车辆主要是由非协调相位(如左、右转弯车辆)和可能出现的协调相位中的少量滞留车辆组成,下游的这部分车辆清空时间不考虑,上游协调相位车辆到达下游路口的过程中一定会踩一脚刹车,至少也是要提早收油门。
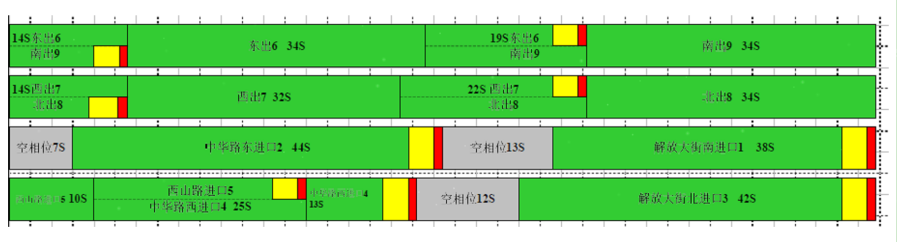
这是我自己一个的双向绿波时距图,静态的时距图:
辛武平博士:用来配时的交通输入数据(turning movements)要理解成稳态交通流。由此产生的排队-是稳态意义下的排队。时距图当然可以考虑排队,没有考虑排队的时距图,是设计者的水平、见识和能力问题,并不是时距图本身这个工具的问题。所以我不明白时距图有什么好抱怨的。
辛武平博士:时距图一定是稳态的。不存在“动态”时距图——-这是我个人强烈的观点。“动态时距图”,我认为是有偏差的认知。。在时距图上,可以叠加动态车辆轨迹,这时候,时距图相当于参考背景板。加了轨迹的时距图,也不能叫“动态”时距图。
田宗忠教授:时距图是表示信号配时方案的最好工具。我理解的动态时距图是感应控制下协调相位启动时间可以变化。如果不是这样,我就不明白什么是动态时距图。
田宗忠教授:这个时距图只是linkband,都是单边轮放。这种设计只是为了绿波而不考虑效率吗?@蒋建明
德州大学李鹏飞:这个是时距图设计和运行的gap,这个其实要用仿真和ATSPM结合在设计阶段看出变化后得time space diagram。我们现在和德州交通部门合作的项目要解决的就是填补这个gap。设计和运营用了两个完全不同的体系,产生很大的认知矛盾。
德州大学李鹏飞:小刚说的也是很多实际运维人员的困惑。
田宗忠教授:怎么理解两个完全不同的体系?
德州大学李鹏飞:设计是fixed timing,不考虑tsppreemption,甚至行人。很多不考虑actuated coordination,但实际上这些都有,并且都算在评估体系里。
德州大学李鹏飞:设计方法是20年不变,但运维几个月可能就来点新东西。最近发现玩peertopeer的agency越来越多了,这个其实是抛弃green band的开始。
蒋建明:我那张时距图是为了表示绿波控制模式下,每个路口的协调相位绿灯时长的不同阶段,画这三个路口的时距图,当时是利用宜春(整个城市以单边放行为主)的某路段实际应用的案例,由于原方案就存在没有很好的考虑下游路口清空时间问题,针对问题,为了能表示的比较明显,就用了相对夸张的方式,将清空时间增大了。
田宗忠教授:时距图已经使用五六十年了。我不知道有谁做配时不用时距图的(实际画出来或是脑子里的想象)。如果有谁认为有比时距图更好的方式,请给大家分享一下。无论我们个人什么观点,最终什么能得到广泛采纳和应用才是最后的见证。
辛武平博士:不止,最早是1918年就开始用了,100多年了。说是交通工程师的祖传技术,不为过。
德州大学李鹏飞:不好意思,我不同意以上的观点,祖传的工程技术不等于就是经得住时间考验的好技术。八旗的骑马射箭还是祖传几百年的技术,如果没有洋枪火炮的出现,可能还能横扫世界。但问题是洋枪铁炮的确出现了,之后骑马射箭迅速退出历史舞台。green band刚出现的时候,是什么样的交通流和信号控制系统?没有检测器,固定配时,交通流低而且单一。这些情况下,即使没有Band这个词发明出来,工程师们也会按照观察一点一点的做出一个事实的Band。这也是一个骑马射箭型的祖传技能。
但现在是什么情况?交通流花样太多了,连电动单车都得算一个新的mode,交通信号灯功能花样翻新,各个厂商纷纷推出一些特有的小功能。再加上bike signal,TSP,preemption以及leadped time,delay green这些小东西。这是一个需要洋枪铁炮的时代,即使洋枪铁炮还没发明出来,但对于洋枪铁炮的需求也是客观存在的,还用骑马射箭,不代表它能满足对新式武器的要求。
绿波带设计能涵盖的内容,所能解决的问题,现实中是越来越低了。现在打印一个完整的Econolite信号机timing大概要100多页,但coordination的内容估计不到20页吧,从Synchro能直接进来的估计更低了。所以,现在信号控制设计中有90%的工作是Green Band之外的事,但因为新的设计体系还是没有成熟,所以还得用band说事。
小刚提出那个灵魂拷问,很多人何尝没问过自己?交通信号控制估计一直在路上,走不到终点站。因为终点站在移动,可能比追赶的速度还快。
为什么大家还在用Green Band说事呢?因为这是大家都可以接受的东西,不是因为它多先进,而是因为它是一个可以用来交流的共同语言。新方法当然一直都有,比如自适应,也是在尝试超越绿波理论。但种种原因,无法大规模推广。
我对peertopeer很有兴趣,这个功能加上logicprocessor,提供了一个agency可以接受的编程工具,来做不是基于Band的coordination。。这个如果慢慢推广开来,那么今后的coordination那可就有意思了。比如德州某市,最近搞了一个5个路口的peer-to-peer联动,用来清空火车通过造成的超长排队(主干线上高峰时期10分钟的红灯),效果非常明显。整个过程是没有考虑任何Band,因为火车一过压根就没greenband了。
张福生老师:我觉得大家都是在从不同的角度看待这件事情,有设计方法,有实际应用,有普适的原则,有具体的个案。
田宗忠教授:可能什么是“协调控制”各人的理解都不一样。就像是感应控制和自适应。
蒋建明:我个人认为,协调控制的范围要更广一些,静态绿波控制只是协调控制中的一种最基本的控制形式,而且如李鹏飞老师所说,现代交通中的问题情况也确实是越来越多,静态绿波控制这种最基本的协调控制,可适用的现实场景范围也越来越少,大中城市这方面的问题会更加明显。
田宗忠教授:@蒋建明 想听听怎么定义静态绿波?给一个非静态绿波的例子和应用吧。我们的大部分路网该怎么协调控制?
蒋建明:说到绿波控制,目前国内有用到绿波控制的城市,主要是应用于少部分的主要干道上,使用固定的等周期(交通需求小的路口使用半周期或大小周期),固定配时加主协调相位差,对平峰的某个特定时段使用“时间表”调用“绿波”方案,凡是用“固定配时方案”加“时间表调用”的控制方式,在我的认知中就认为是“静态控制”,与是否做了绿波优化无关。
我认知中的“动态控制”,不管是中心控制还是本地控制,至少在某个时段内,每个周期时长的绝对值,或每个阶段(相位)的配时绝对值,以及主协调相位的相位差,都是在控制系统通过某种算法的控制下,在不超过三个连续运行周期内,每个关联协调控制内的交叉路口的交通信号控制参数至少有一项是有变化的,这样的控制模式我认定为“动态控制”。
中心层面的动态控制,我参与做过SCOOT系统的,也见识过SCATS的区域协调控制,我自己没有做过完全本地感应的动态绿波控制,只做过半感应相对固定周期下的动态绿波控制,其方法是用普通固定配时参数做背景方案,主路给予固定配时参数,对支路做需求“请求窗口时间”等待加感应延伸的方法控制配时参数,多余时间只能酌情分配给该支路相位相序前、后的相邻相位(等待窗口时间给前相位,感应结束后的剩余时间给后相位)。如果支路交通需求趋于饱和,则该控制方式等同于固定配时“静态”控制。
我所参与的这类“动态控制”,“绿波”均是做为“副产品”,酌情考虑其效果。
蒋建明:动态控制是一个集合中的母集,中心层面的区域协调控制和本地完全感应控制(是否能做多路口协调,暂不知道)或半感应协调控制,这些都是母集中的子集,同样,协调控制可以是另一个母集,子集中有中心层面区域协调控制,本地的半感应协调控制,本地的非动态(静态)绿波控制。两个母集中存在着交集。
田宗忠教授:@蒋建明 你说的那些变动或者是感应控制下的协调,或者是Traffic responsive,自适应等背后都必须有“绿波”的支撑。也就是本着让主要车流少停车的目标,不管是否把时距图画出来,还是以其它什么方式描述。目前看来,用以描述这种协调控制的,除了时距图,我不知道还有什么更好的工具。
蒋建明:您的观点我绝对认同,实践中也基本是这样做的。我个人的做法也是根据实际条件和用户倾向综合考虑,如果是多路口(五个及以上)以追求主干道车流出行驾驶体验为主要目的,我就会考虑按照静态绿波协调的控制模式设计路段关联路口配时,如果具备中心层面的区域协调控制,还是倾向于中心层面的区域控制(国内绝大多数城市完全具备条件,基本上是一种奢望),三个及以下路口的协调有条件做半感应协调就做半感应协调,没有条件也只能选择静态协调。
李克平教授:理论层面说,只要相序自由灵活,周期不一定需要统一或半周期等。
张福生老师:可以再扩展思考一下概念:什么是周期,在协调控制场景下周期应以被协调相位两个协调点之间的时间定义,而不是所有相位全部执行一周。
蒋建明:某个时间点上单个、单次周期绝对值可以是不一样,但拉长时间轴,多个周期的平均周期时长一定是趋同的。
张福生老师:所以田老师说的是道,其他的灵活的方法是术。
李克平教授:我的理解,周期还是应该定义为所有相位全部执行一周的时间。如果采用感应跳跃相位的情形除外。
张福生老师:基本概念的理解矛盾浮出水面了,快找到问题了
戴高:跳相一般情况下还是没啥需求,也算看过轮过了。
李克平教授:我的设想是:假如一个交叉口信号每个周期内的相序都是可变的话,则该交叉口的信号周期不一定必须与公共周期一致;再外推,实现绿波控制本无需公共周期!这只是一个设想,甚至是幻想!
张福生老师:同一路口,协调相位的协调点之间的时差具有周期性,这就是绿波控制的周期。
蒋建明:有相位被跳跃,只是该相位的时间给了其它相位,总的周期时长并没有改变。
戴高:模式自定义。
张福生老师:至于在一个协调系统中,某些节点(路口)可以半周期、倍周期或大小周期、甚至多个不同周期,其实都一样,最终为满足一股(或两股)交通流俩徐通过的协调点之间的差是“稳定”的。
田宗忠教授:张老师总结的精彩。如果是固定配时,101和103秒的周期就不叫协调。如果美国感应下的协调,有一固定点决定了周期性。也有固定周期,同样不能使用类似的周期(101和103)。即使德国(非自适应),也有一个虚拟的周期在背景下。
张福生老师:除协计划时间外,其他时间都是其他相位让渡的时间,本来也不是我要的,这个不算!再前进一步,所谓的周期应该指观测过程中某一观测点的出现具有周期性规律。
李克平教授:受我们的公交优先信号控制研究成果的启发:既然可以调整交叉口公交车方向的绿灯时间窗,为啥不可以用来对“绿波”车队进行“优先”放行的控制!目前,只是一个设想而已。
蒋建明:我说的单个周期的绝对值改变,例如某个四阶段(相位)控制路口,相序是东西直行⇒东西左转⇒南北直行⇒南北左转,直行为主流相位,左转为半感应控制,当南北左转因需求较少被提前结束,时间被分配给了东西直行,这时上一个周期等同于没有走完全部周期时长被提前结束,而当前周期提前开始,时长比配置时长多了上周期早结束的时长。上一周期和当前周期的单次周期绝对时长均被改变,但上一周期和当前周期的平均周期时长是没有变化的。
蒋建明:这个对于在路口调研收集数据的人来说,他不知道,调研人员只是看到了两次周期的时长发生了变化,如实统计收集到的数据就OK。
半感应就是给支路设置窗口等待时间,在窗口等待时间结束前出现需求,相位就出现,结束时间可以随感应延伸情况结束(不超过配时给定的结束时间点),也可以固定时间点结束。如果让渡时间改变了原本周期给定的启动时间点或结束时间点,那当前周期时长的绝对值就会发生改变。周期内的配时时间让渡并不会改变当前周期时长。如果抛开周期的启动时间点和结束时间点谈论这个是没有任何意义的。
蒋建明:李老师讲的这样的案例,也存在有公交优先的相位是在周期方案中哪个相序,如果被放在了整个周期中间的个时间点上(不影响给定周期的起始或结束点),就不会改变当前周期的绝对时长。
蒋建明:田老师说的这个是必须的。在某个时段,协调路口间必须有这样一个背景周期,不管关联协调中的某个路口即时周期怎么变化,只能在一定范围内围绕这个背景周期做小幅度的上下波动变化,绝不可能出现脱离这个背景周期的束缚,而一味的向上波动或向下波动。
王小刚老师:这个也不是必须的,持续向上波动,累积达到一个所谓的周期呢?在持续向上的波动过程中协调相位的“锚点”基本固定,逐渐接近所谓的双周期呢?
蒋建明:@王小刚 那也先是背景周期的持续向上或向下变动,关联协调路口围绕并跟随这个背景周期同步持续向上或向下波动。
刘伟教授:理解蒋总说的周期的变化了,但是,对于控制机的协调参考点时间是没变的。
王小刚老师:如果没有达到所谓的双周期,转而调头向下调整,那么这个转换过程中,周期又在哪儿呢?
蒋建明:当然这个背景周期是被若干个关联协调控制路口中,交通需求最大的那个路口所牵动,其它交通需求略小的路口是被动跟随波动。
王小刚老师:张老师的这个说法,符合协调控制的本质。现有的周期概念,只符合固定配时下的定义。
蒋建明:@刘伟-重庆交大 周期变化的参考点就是关联路口之间交通需求最大的那个节点。
王小刚老师:又扯到交通需求最大的所谓“关键路口”了,那么那个关键路口的需求从哪来的呢?天上掉下来的?
王小刚老师:李老师的这个概念,不仅可以增加协调控制的弹性,部分突破所谓的周期,也为相位差的过渡打开一扇窗。
王小刚老师:其实这些还不是我吐槽现有时距图的主要原因。
蒋建明:一条干道上总免不了有干—干相交的路口吧?不可能全是干—支相交路口吧?就算全是干—支相交路口,支路上也存在交通需求不相同的场景,怎么就不存在交通需求有大小之分了呢?
王小刚老师:这不是一条路的协调概念了。
德州大学李鹏飞:固定周期是为了解决不用连电线就能把交叉口关键起来,现在都普遍连起来了,所以周期真的不必要,如果周期不一致了,现在设计体系,几乎可以推翻从来了。
王小刚老师:现有的时距图难道不是仅表征干线的两个方向?
刘伟教授:某路口非协调方向流入到协调方向的流量大,该交叉口需要协调的流量成为该绿波最大的流量路口是否理解为关键路口。@王小刚
德州大学李鹏飞:其实agency已经开始自发的走这条路了。听了好几次用peertopeer解决一个具体问题,都是实战人员,和理论没啥关系。到有几次我看到的设计叹为观止。
王小刚老师:为什么仅仅说流量呢,此路口非彼路口,每个路口的吞吐力也是不一样的。
蒋建明:刘老师说的控制参考点是不是还包含了相位差?动态相位差优化,对于本地控制来说,难度还是比较大的,我个人是这样认为的。
刘伟教授:@蒋建明 我说的是协调相位的参考点,和张老师说的参考点之间时间间隔为周期结合起来理解的。刚才鹏飞和小刚说的周期不固定我理解的是协调相位的两次参考点的时间差可变。前天讨论的绿初或者绿尾为参考点,对非协调相位转入协调相位后的排队清空有差异,绿初做参考,可能协调相位有排队未清空,引起上一路口的车辆减速或短时停止。
王小刚老师:协调相位的参考点每个周期都可能不一样的。
德州大学李鹏飞:其实周期不固定,也就没相位了。
张福生老师:小刚说了另一个关键点,从“需求”和“能力”两个角度上看,协调的目标是满足需求,谁的“需求”作为主要“需求”,谁就是关键路口;于是,协调过程中就要看满足需求的“能力”,不同路口能力不同,需要的时间就不同。
王小刚老师:排队长度,上游路口前置相位的绿灯时间,下游路口相序的变动都会需要改变相位差。这个才是关键问题。
德州大学李鹏飞:所以我说,共同周期这个基础概念如果拿掉,或者大部分时间都用不上,那基础理论都得改。
蒋建明:我理解的协调控制就是类同于阅兵式上走队列,不管是哪种队列(人员方队或是机械车辆方队),队列的行进速度必须要趋同,如果是抛开协调,所有的一切都可以“各自为战”,可以是单个节点的“各自为战”也可以是极小范围的“团队结合”,团队结合,队友之间就要有协调,与团队大小无关。这也包括了李鹏飞老师说的“peer to peer”。
德州大学李鹏飞:还有一些不可控的骚动,现在越来越多。
王小刚老师:而时距图只表征了时间这一个维度,一条绿色的带宽拉上去很漂亮,但是这路口对应的是3条车道,那路口对应的是2条车道;这个路口上游的前置相位输入大,那个路口没有输入;更不说横向的干扰、路段的长度、运行时速等影响因素……考虑这些后,再看时距图,有什么意义?
蒋建明:在非饱和交通条件下,需求应当做为首要的交通信号控制基础参数,即其它的交通控制参数都应该围着“需求”转;在近饱和或超饱和交通条件,则必须是以最重要节点(路口)的通行能力作为信号控制方案的首要基础参数,其它的控制参数都应围着通行能力转。也就是说,不同的交通需求条件下的优化主攻方向是会改变的。
小刚总说的这个观点我绝对认同,当前绝大多数拿出来说事的案例,都存在小刚总提出的问题。
张福生老师:@蒋建明 饱和了就别谈协调了,控制目标都变了。
刘伟教授:小刚总说到另一个层面了,车道组织设计与绿波设计。
王小刚老师:这些问题是显性的,也不是啥高深的东西,但设计工具并没有改进。
蒋建明:上下游路段之间的车辆腾挪移动可不可以最协调?不清除下游路段中一定空间的排队车辆,上游出口随意给绿灯信号有用吗?
王小刚老师:交叉口的渠化配置,展宽长度也影响交叉口的通行能力。我们常常把时空一体化挂在嘴边,但是在时距图中并没有表达这些空间的关注,所以要改进。
蒋建明:只要是上下游路口之间遵循一定的同步规律进行控制,均可看成是协调控制。
张福生老师:需要一个立体的时距图。
王小刚老师:协调控制中,时间是为空间服务的,空间的腾挪才是协调的本质。所谓的交通需求,相位时间的相互掣肘,应先通过空间的优化去平衡。而不是死抠着几个参图。
王小刚老师:可以通过通行能力的转换计算得出一个平面的时距图。
蒋建明:我始终认为绿波(不管是静态还是动态)只是协调控制的一种特殊形式。
王小刚老师:协调首先要对需求进行管理,然后是渠化优化,再来进行信号配时设计。现在上来就是信号配时设计,这有点本末倒置。
王小刚老师:这里说的需求管理不是大的TDM,是指通过接入、渠化和信号配时方案调到达。现在信号配时完全在末端,完全被动的去配时,效果一定好不了。基于此,也常常给协调设计说一堆前置条件,也难以认同。
蒋建明:这段话才应该才是刚总这几天要表达的真实本意,之前可能还是因为刚总在边喝酒边说事,没能把要表达的本意讲清楚,才有了某些误会出来。
环岛信号控制以及完全感应控制
王小刚老师:下图是十几年前做的一个5岔异形环岛的控制,相当于5个口的协调,也画不出时距图,也找不到barrier。
刘伟教授:空相位是什么意思?
王小刚老师:4环不够用,其实相当于7个环。没有输出,占位置。当时,信号机的底层结构是做了修改的。可以这么说,到今天,很多厂家的信号机搭不出这么个环结构。
刘伟教授:你画的环?哦,环岛,有冲突的进出才需要barrier,没整体的barrier。
张福生老师:控环岛用ring-barrier结构设计会累死人。
蒋建明:@王小刚 您若是将这个环岛的五个岔口,分别按照五个带灯空右进右出和正常情况岛内左转不受控的三叉路口控制,应该能画出这个五岔环岛的每个三叉路口的时距图来。
王小刚老师:或许可以。
张福生老师:@蒋建明 太麻烦了,用phase in stage设计比较容易一些。
杨斐:@王小刚 4个单环独立跑,再分别设置相位差,对环控信号机要求有点高。
王小刚老师:@杨斐 其实是7个环,同一个相位又进行了拆解,当时好像是相位切换时黄灯出现的困扰。后来,把底层的数据结构也做了些修改。
蒋建明:不是做单纯以追求绿波效果为目的控制,我也不会使用时距图的。@张福生老师
刘伟教授:@蒋建明 很复杂,华盛顿的杜邦环岛就是这样控制,我看了更近,也没把他的方案画出来。
李克平教授:现在都用LED灯了,信号机与灯的距离应该足够长了,就可以用一台信号机控制一个环岛,其实一点不复杂!
王小刚老师:是一个信号机控制的,通过冲突分析硬搭的。
杨斐:四个环应该可以解决了,是不是overlap设置的有问题,要用虚相位叠加,黄灯和全红应该可以。@王小刚
王小刚老师:也可能是受当时的认识局限,overlap搭接的时候,中间闪一下黄灯,后来改了一下信号机的逻辑,出现黄灯和不出现黄灯用了两个逻辑。
王小刚老师:提这环岛的案例,只是想说明,治理某个路口,功夫在此路口之外。四个环,5个口,每个小口的到达和释放相互协调,确定协调的基线,通过剪刀差确定相位合适的位置,以通行能力为基准,我觉得才是协调控制优化的方向。
蒋建明:而且倒计时是整个项目的问题。
李克平教授:我的理解:环是一种相对标准化的控制模式,应用于比较标准的交叉口可以得到简化和便利。但是对于特殊形式的交叉口,比如环岛,可以完全不必拘泥于环的模式,直接采用Signal-Group对/组的模式,就很简单了。
张福生老师:@李克平 讲个故事:当年和大连交警姜支队曾经做过“人-机混合信号机”控制环岛的实验,在中心用信号机,再用对讲机指挥环岛各个入口的警察用手势控制,只在高峰时段使用,不用装信号灯。
蒋建明:@刘伟-重庆交大 奇数岔口环岛控制用不同岔口间的相位前后错时搭接会更容易一些,用一机多三叉口控制的方法,跟单路口错时搭接只是错时时间长短直接设置,用多路口方式设计,就要算每个岔口的相位差,最终的控制结果是一样的。如果用多三岔控制方案,把环岛看作是一个封闭路段内的协调控制就没问题。
张福生老师:不完全,因为环岛这条蛇,蛇头咬着蛇尾。
蒋建明:只是环岛多三岔路口控制等同于对三叉路口横道进口车辆的右进右出控制,且在正常情况下(不出现环堵死锁),对已进岛车辆在岛内环行时不受控,环岛控制最好具备防环堵检测,岛内出现环堵后,各岔口只出不进,直到解除环堵。怎么能让蛇头咬住自己的蛇尾,那就是个细心活了。没点耐心的人也玩不转交通信号控制这个行当。
李克平教授:三岔路口没错,但主线(环内)是单行;如果岛内不控,则进岛方向只能用黄-红-(黑)-黄的信号顺序,不能给绿!
蒋建明:@李克平教授 岛内最内道设置为左转车道,给常绿箭头指示灯,出现环堵后只给出岛绿灯信号,其它均为红灯信号,包括环岛岛内绕行车辆也是红灯信号。
李克平教授:@蒋建明 :先不说出现环堵后的特殊控制模式,先做好常规不拥堵时的控制方案。环岛控制有一个比较难办的是出环岛车流与行人流的控制问题。
蒋建明:如果是用多三叉路口控制方案,行人相位比较好处理,每个三叉口都有很长一段时间是机动车全红阶段,给行人相位配时。如果是单路口控制方式,每个岔口的行人相位也是要用错位搭接的方式配时。
王小刚老师:是的,这是环岛信号控制的硬伤。如果要保持环岛最大吞吐率,就要保持出口车流连续。那么出口的人行横道如何控制,其尾巴的冲突点离环内车道的距离一般也很短,允许排队空间太拘束,但行人又难以估算。
王小刚老师:信号控制有两个游戏类比很恰当:贪吃蛇以及地狱十八层。地狱十八层是你往下跳,然后要弄个跳板接住,与需求和响应很契合。
蒋建明:环岛控制的出岛绿信配时一定要比进岛绿信配时长,也就是说人为使出岛通行能力大于允许进岛的交通量,否则必死无疑。
王小刚老师:交通控制有受控movement,也有非受控movement,其实并不能精确调节。如果右转也控,好多人接受不了。
蒋建明:或者说人为的使进岛交通量始终小于出岛通行能力。
王小刚老师:所以这要在空间设计的时候就要把让和信号分开,不然,难办
蒋建明:如果是偶数岔口(四岔或六岔)环岛,相对好办些,每个正对向一组,进出岛同时开启绿灯,进岛早于出岛关闭绿灯。但是奇数岔口环岛就会比较麻烦,同一岔口的进出岛绿灯时间存在早启晚灭的错时情况。
辛武平博士:这里面的相位差offset定义是哪来的?Sync pulse一般很少有人提到(NEMA-TS2里面倒是提到sync pulse)。现在的系统很少用到sync pulse了,那是UTCS closed loop signal control system master controllerr发给local controller的对时信号。
辛武平博士:另外相位差是一个相对量,总是有一个参考系的。只是我们提相位差的时候,不会显式的指出参考系(masterclock=00:00或一天的任意时刻都可以作为参考原点)。
辛武平博士:我感觉大家把“相位差”,以及两个相位差之间的差值-“相位差的相位差”,逻辑上搞混了。后者跟参照系无关(因为差值计算,参照系被取消了)。
辛武平博士:小刚这么说,并不严谨的。协调相位的“实际起始点”,和“实际结束点”,在感应协调控制,在每个本地背景周期的内部位置,可能是不一样的。但协调相位的参考点,在本地周期的内部位置,一定固定的,不会变化。协调参考点,是根据协调相位的。
田宗忠教授:戴总家的信号机相位差定义是按辛总描述而定义的。
辛武平博士:如果用协调相位的实际起始点或者结束点,来判断周期,那么感应协调下的周期,是围绕背景周期变化的,是不固定的。但背景周期本身,必须、一定、必然是固定的(它代表了信号稳态控制的nominalstate)。“变化的周期”平均下来,也一定趋向是背景周期。所以,我之前觉得,蒋工能明确指出这一点,很有见地。
协调相位的“实际起始点”,和“实际结束点”——在感应协调控制的条件下,这两个点在本地背景周期的内部位置,有可能会动态变动。但协调相位的参考点,在本地周期的内部位置,一定固定的,不会变化。协调参考点,是根据协调相位的设计split决定的,是一个immutable的位置。
另外,感应控制的“实际周期”,向上波动,是一个危险、谬误的伪命题。不能用“向上波动”的实际周期,来作为增加背景周期的依据。为什么?因为感应协调控制下,实际周期向上波动,无非是感应相位gap-out或者skip导致协调相位提前开始或延迟结束,不是真正的需要增加cyclelength。
如果按这个逻辑,来增加背景周期,那可真是谬之千里了!
田宗忠教授:德国和瑞士做得更复杂,灵活。如果你去实测周期,会发现每次都不一样。但仍然在一个背景周期下变动。他们也不提相位差这个词,而是通过标注每个相位的可能起始点来隐形地定义相位差。
辛武平博士:实测周期,就是根据协调相位的可观察实际起始点(或者结束点,来决定。在感应协调下,这个“实测周期”,是变动的。但这不影响背后固定cycle的背景周期。背景周期的local zero点是没法用肉眼观察的。
本质上,不论德国还是瑞士的系统,跟NEMA感应控制的基本思想,都是一致的。就像人类的有各种语言,语言有各自的语法和词汇。表达同样的事物、思想、情感,不同的语言有不同的表达方式和用词,但底层的思想和情感,以及人性是共通的。不管德国还是瑞典,或者美国的感应控制,基本的思想,都是类似的,也只能是类似的。为什么?因为要解决的都是类似的问题;要实现的目标,都是类似的目标;受到约束,都是类似的约束。殊途同归,发展下来,在系统设计上,必然没有本质的区别,在互操作上,也必然是可以等价转换的(当然,转换的复杂度会有所区别)。
不同的系统(德国/瑞士vsNEMA-TS)对现实世界抽象度和实现细节可以不一样,但只要解决的是同一种问题,同样的目标和约束,他们背后的思想,就必然是高度一致的。这个大局观,适用于感应控制。我们讨论问题,在大局观前提下,讨论细节,才不会迷失。
蒋建明:今天一大早看到辛博士发的信息,太有价值了!过去我对本地感应协调控制完全不理解,我入行初期,我师傅跟我说过这样的句话:完全车辆感应(VA)控制是没有周期概念的,在最大绿时间限定内,所有阶段(相位)绿灯时间是根据交通需求,走到哪算哪(即需求结束绿灯才结束)。这就禁锢了我对完全车辆感应控制的认知,既然感应控制没有周期概念,那又该如何做协调控制?这是我心中始终没解开的结。直到现在我还是想问,群里哪位大咖能用最简单直白的语境表述一下完全车辆感应控制的协调控制机理是怎样的?
林冬梅老师:完全感应就不协调了啊。协调的话就必有协调相位不是完全感应。
蒋建明:@林冬梅 谢谢冬梅老师,如果是这样的,那今天总算是将我多年的心结解开了,我想再次征得群内大咖们的确认:完全车辆应控制模式是不可以做协调控制的,只能在半感应控制模式在具备做协调控制的条件?这样理解是否正确?
辛武平博士:Full yActuated Control没有背景周期,是不能做基于背景周期的协调控制的。但是,基于P2P的完全感应控制,也可以做到协调。
很多自适应控制系统,就是把信号机设为完全感应模式,然后或者通过Phase Hold/Omit/Force off这些动态命令,或者通过Logic Processor/P2P来实现动态协调。
蒋建明:可不可以理解为:在有中心控制系统的干预下,信号机本地的完全车辆感应控制模式是可以实现某种程度的协调控制的?
辛武平博士:可以是从中心控制系统发送干预命令,也可以是本地分布式系统通过P2P通信发送命令。
蒋建明:这样的车辆感应控制模式,我觉得已经不能算作是完全的本地车辆感应控制了,还是应该归结于另一种中心系统协调控制,只是用于决定绿灯信号时长的数据类型和算法与传统类型的中心系统协调控制有所不同。
辛武平博士:的确如此。应该算是利用现有标准信号机的fullyactuatedcontrol功能,来实现“自适应”的一个技术性巧思。
戴高:全感应控制、自适应控制在饱和后还能干电啥不呢?
蒋建明:@戴高 完全超饱和后等同于某种特定状态下的定周期控制,但绝大多数路口的实际高峰期的超饱和状态(场景)通常只有20分钟左右,极少有超过半小时的,只要忍受过去最黑暗的这半小时,自适应控制的绿信比和相位差参数的动态优化还是要完爆任何“精细化”设计出来的静态模式下的定周期协调控制模式,尤其是平峰向最高峰过度和最高峰向平峰过度(通常需要20分钟到半小时)这段时间。这里存在一个维持系统良好运行的成本和运维团队的整体综合能力问题。
戴高:超饱和后,还有啥控制目标没有呢?
蒋建明:上游限流向下游放车,绝对杜绝短路段车辆排队溢出,是超饱和交通条件下的主要控制手段和目的,绝对不可以想着怎么在交通需求最大的节点多放车,越这样想死的越惨。如何很好的限流和削峰填谷才是玩好超饱和交通条件下信号空的真谛。
最简单的方法就是以车流相对密集的中心区域,向干道两个不同方向,借助短单边放行搭接,让驶离中心区域的绿信时长(通行能力)大于进入中心区域的绿信时长(通行能力)。
刘伟教授:@蒋建明 拥堵的高峰时间在全天的时间比例确实不高,限流削峰是被迫的,其实还应该看网络的瓶颈是否在绿波路段上,如果不是,可以考虑多放车出去
蒋建明:@刘伟-重庆交大出现 拥堵时一定要要抛弃绿波的念头,饱和交通时玩的是时间协调下的空间大挪移。
蒋建明:这里我说一下我个人对绿波和空间挪移之间有啥不同的拙见:绿波是利用某种技术手段,有目的让主干道上无规律的间断车流,尽可能最大化的变成有规律的连续车流,通过该干道上的每个交叉路口节点;空间挪移是通过某种技术手段,让干道上无规律的间断车流,变成有规律,且分段占用不同路段上,趋于等量空间的间断车流,有序推进移动。平峰时段的绿波控制与高峰时段的空间挪移,都必须要依托于“协调”才能实现,方法类似,但首要目的和具体的方案设计细节完全不同。
蒋建明:根据我个人的从业体会,我觉得空间挪移比绿波更具挑战性,难度也大得多,更是解决当今高峰时段交通拥堵的可利用的重要低成本手段之一。
刘伟教授:是的,空间挪移太难了。
张志远:认真学习了各位老师的讨论有些启发与感受。信号灯控制实现交通流交替通行、批量放行;智能信号控制能不能考虑让多个路口的交通流交替通行,这是不是要用区域自适应去实现,可以车辆在更长的区间内匀速通行,即要用协调好关联路口的交通流相位差,也要调整好各路段的交通流密度,也就是要调平衡;再就是批量放行,路口的批量一是道路两侧接入口汇入路口的量,二是上游路口进入本路口的量,根据路口的通行能力与饱和度,这个量不是掐的越准越好,否则会因路段车流密度太大影响通行效率甚至回溢。协调控制用时距图写出基础相位差等参数,这个是时间上的量,那么协调控制空间上的量怎么评估,以使协调控制达到最优效果。因为时距图不能反映当前下游路本身的疏散需求。总之这些在信号控制上的理想场景能不能用更加高精的算法来实现。有理解不对的地方希望各位老师批评指正!
蒋光胜:@张志远 基于通行能力(效率)和路网均衡的绿波协调见的比较少,现在的绿波协调工具多数是基于路口间距、协调车速和信号周期来计算的相位差,协调道路路口间通行能力的匹配问题,还要依靠信号配时工程师的经验,对路口的相位差和绿信比做一些微调。
张志远:在路口有过饱和风险的情况下,控制目标该不该改为截流调平衡。
蒋建明:这种情况下,首先要打消怎么样拥堵路段或路口的车快点清除掉,而是要考虑逐级对上游路口的限流。
张福生老师:关于饱和和过饱和,要考虑到很多时候是伪饱和。
王小刚老师:如果考虑空间,则加上lane by lane。
王小刚老师:不考虑空间,时间最优解就是绿灯期间服务的车辆运行于饱和车头时距。过饱和状态下,包括红灯期间排队+绿灯运行期间加入的排队+以饱和流率驶来加入队尾的车辆。
辛武平博士:是的,不考虑空间——就是先以最大绿(周期性)运行到t,再以最小绿(周期性)运行到拥堵时段结束。t有一个最优时刻点,可以算出来。不过,这只是简化的理论分析(有一些假定并不太实际,比如需要知道demand curve的终值,需要知道congestion period的起止)。所以,只是课堂上的理论分析。

延伸阅读!
VIP项目信息
- IOV114 运输信息化近期招标项目一览(11月NO.4)
- ITS114 智能交通市场每周千万项目(11.14-11.20)
- ITS114 智能交通市场500万以下项目(11.14-11.20)
- ITS114 公路信息化市场每周千万项目(11.14-11.20)
- ITS114 安防市场每周千万项目(11.14-11.20)
- 公路信息化之800万以下中标项目汇总(11.16-11.30)
- IOV114 运输信息化近期招标项目一览(11月NO.3)
- 山西省道路运输车辆检测联网机构名单(截至11月10日)
- ITS114 智能交通市场每周千万项目(11.07-11.13)
- ITS114 智能交通市场500万以下项目(11.07-11.13)
