田大新:计算-通信-控制交叉融合在车联网领域的应用实践
本文为北京航空航天大学副院长、教授田大新教授在第十七届中国智能交通年会专业论坛之一的道路交通控制与优化论坛上所做演讲的速记整理而来,未经本人审核,如有错漏,敬请谅解。
计算-通信-控制交叉融合在车联网应用发展背景与趋势
目前全球正在积极推进车联网发展和部署,我国已经发布多个国家级战略规划来推动车联网与智能网联汽车推动,欧美日等国家分别发布了行动计划来支撑相关系统发展。上述发展趋势表明,车联网相关的核心技术与系统装备已经成为全球产业发展的热点。 在车端,传统机械主导的车辆技术在智能化和网联化趋势推动下,正向着信息通信技术方向演变。在路端,车联网可有效连接交通系统的海量设施,促进实施交通数据传输与交互,能够在多层级计算资源、与人工智能技术支撑下实现交通出行智能化信息服务的泛在化和运行管控的全局化。而车联网系统的计算通信控制的融合在算、通、控层面分别面临着瓶颈和制约,存在控制态势是否耦合等挑战,需要解决边缘性的难题。 网络是互联网的核心,在通信技术不断演进下,车联网将实现超低延迟、超高可靠、超大覆盖,实现车和环境有效协同。提升交通效率,在未来支撑实现零事故、零伤亡的无人驾驶交通系统。基于车联网的广泛连接,云平台通过终端与云中心的协同,将人、车、实体拓展到云上的实时影射,实现物理融合,提升车联网计算与控制水平。在这种发展驱使下,车联网系统在计算通信控制等方面,也面临多项挑战。在计算上,传统中心化的固有计算,导致传输延迟高,数据处理及时性低,以及隐私及能耗问题,制约了云管、云控效率,无法满足海量信息的要求。 在通信方面,大规模车路设施自主化和协同化带来了自主灵活、高可扩展的连接需求。车联网与车路协同系统的集中式体系,具有较大规模复杂性和结构复杂性,无法完全支撑交通系统的需求。在控制层面汽车智能化和网联化,推动了车载传感器的广泛部署与连接,导致车载数据量爆炸式增长,在海量数据的使能下,如何确定人在车和路耦合环境下的高效决策与可靠控制,也成为一项重要的挑战。 计算-通信-控制交叉融合在车联网应用的创新研究
面对上述这些挑战,北航团队对车联网领域的计算、通信和控制融合创新提出一些新的研究方法。 在计算方法方面,以边缘计算技术为车联网系统提供了群体边缘智能的新范式,通过计算、存储等资源在靠近车辆和路测设施的网络边缘,能够实现计算节点与数据实时处理,从而降低大数据传输与处理的延迟。将边缘计算与人工智能技术应用于智能网联车辆,能够促进单车智能向群体智能的演进,实现群体车辆的计算与通信融合。 在通信方面,空地协同被认为未来车联网的新形态,利用无人机与网联车协同,能够灵活的扩展地面空间,从而打造高数据低时延的数据链,打造应急救援、感知增强、车辆按需覆盖等协同应用场景。同时,面对车联网通信的安全风险,新型区块链技术可以通过去中心化的方式,在数据共享中构建多方共识,实现数据一致存储和防篡改。通过将AI区块链技术应用到车联网系统,一方面能够形成计算通信融合的自治和自动化能力,实现去中心化的算力协同,同时区块链的共识与防篡改的能力,保证AI所依赖数据可信性,实现网络内生安全,区块链去中心化共识在生态中形成智能可扩展的安全机制,形成多模、跨域的内生安全体系。 在控制层面,网联车辆的编队协同控制,能够有效融合车联网系统的计算与通信能力。通过车、路、云信息交互,实现信息交互,并利用多层级算力协同决策,实现计算通信技术的交叉融合,从而满足行驶安全、通行高效、能耗经济、乘坐舒适的目标。 综合来看,车联网系统的计算-通信-控制的融合在算、通、控三个方面面临不同的瓶颈和制约,存在边缘设施异构资源协同不足,网络渗透率低,链路负载不均的难点问题。为此,在计算方面,北航团队开展了一些研究,比如在车、路、云的边缘卸载与计算耦合方面,聚焦了多层级计算资源,实现可靠调度与感知准确处理,突破传统的计算方法,依托可靠性调度来形成耦合可靠性认知的车联网通信与优化,最终实现群体任务卸载和多耦合的信息计算。 基于博弈论,提出大规模群体车、路、云计算卸载的纳什均衡策略,仿真结果表明,上述策略能够有效的保障纳什均衡的策略,期望系统延迟降低了10%。基于车联网系统耦合可靠性认知的通信与计算联合优化,并融合计算与通信的可靠性,提出面向耦合可靠性的通信与计算资源联合可靠方法,仿真表明在动态环境和存在隐私敏感的车辆情况下,该方法能够保障系统耦合的可靠性远优于传统的现代策略。 针对车联网图像与点云的融合感知计算,北航团队提出了构建点云语义增强模块,并引入交叉比感知分支,提出稳定、鲁棒的多模态引导点特征融合感知计算方法,提升了效率与精准度。 通信方面,开展协同优化与可信数据共享的研究。聚焦空地高动态,稳定组网传输和安全稳定问题,突破传统的技术与传输架构的瓶颈,利用群体的协作传输,实现自适应学习与公路控制的可信传输优化。具体而言,是基于群体进化博弈和信道拥堵定价,揭示纳什均衡策略演化规律,在随机扰动下,构建网联车协同鲁棒传输优化,实现无人机与网联车的协同鲁棒传输优化,并通过仿真实验验证方法的有效性。 针对车联网数据可信共享问题,团队构建了移动性感知与通信模型,并分析了系统的可信共享延迟,基于区块链与深度学习方法建立去中心化的可信数据共享机制,实现了通信延迟与计算准确率的双重保障。 在控制方面,开展了网联车辆的协同编队优化控制研究。聚焦随机扰动下,网联编队可靠控制与大规模节点调控优化的问题。突破了传统编队控制架构的技术通信融合难点,结合鲁棒和资源协同的调度,形成随机不确定扰动下的网联编队鲁棒控制优化,实现协同空地计算。 在协同组网传输使能的网联编队系统中,考虑随机不确定扰动的情况,提出基于鲁棒对等优化的网联车辆控制方法,实现车流间距与速度监督误差,有效降低控制误差。在无人机辅助网联编队情况下,我们将无人机辅助资源的调度用于网联编队控制中,并提出空地协同的资源调度框架,实现了基于空地群体协同计算调度网联编队控制。使编队控制效率提升了约一倍。 同样针对空地协同编队,我们对空地群体的边缘能耗进行优化。发现不同空地编队形态的效能差距近三倍,提出了空地协同的计算能耗优化的网联编队控制方法,大幅提升系统能效,使其性能能够接近全局最优。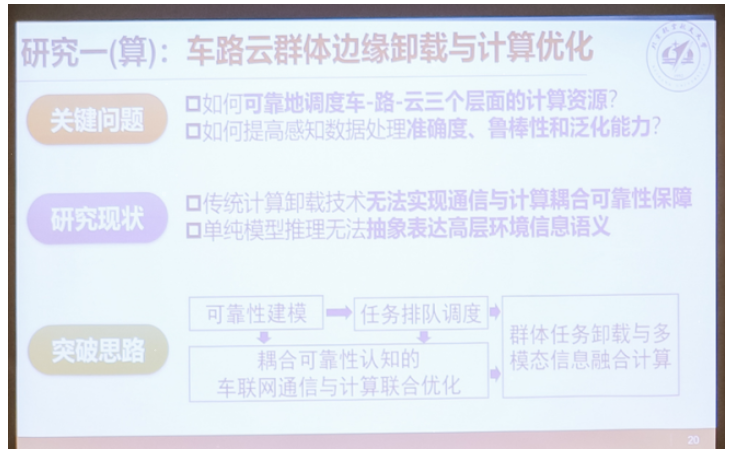
研究与实践成果
基于上述的理论研究,团队近年来在计算-通信-控制融合的车联网领域,也发表了一系列的研究论文。同时,研发了一系列车联网系统装备,并进行广泛的应用实践。在装备研发层面,基于计算通信控制融合研究,自主研发了车联网通信单元、边缘计算组件、信号优化控制器,虚拟驾驶与编队仿真控制平台以及网联车控技术的验证平台,车联网计算通信控制等一系列装备。此外,还构建了智能网联云端的监控平台以及通信计算一体化路侧设施等系列平台。 在实践层面,基于自主研发的车路协同系统,成功应用到了我国首个开放道路环境下的实际道路应用,即在北京亦庄实现了交通信号联动、辅助安全预警、车辆驾驶诱导应用等场景应用。同时,参与建设了工信部的车联网技术基础公共服务平台建设,具体在京沪高速的车联网环境下构建。针对智能网联公交的典型应用,在公交都市试点城市,完成了开放道路的车联网智慧公交的部署,实现公交的优先通行等场景。此外,牵头组建了联队来参加无人平台立体跨域协同挑战赛,在挑战赛中,将无人机搜索与网联车辆相结合,形成空地联合计算。团队在国家重点研发计划专项里面连续承担了两项针对车联网信息安全的研究,提出端、网、云一体化的信息安全保障体,。这一块后面也有很多工作值得研究。 计算通信与控制交叉融合,能够促进车联网系统的安全高效协同。并有助于构建绿色、安全、高效新一代车辆系统。 以上就是我的汇报,谢谢各位专家!请批评指正。

延伸阅读!
VIP项目信息
- 公路信息化之800万以下中标项目汇总(1.1-1.15)
- IOV114 运输信息化近期招标项目一览(1月NO.1)
- ITS114 智能交通市场每周千万项目(12.26-1.01)
- ITS114 智能交通市场500万以下项目(12.26-1.01)
- ITS114 公路信息化市场每周千万项目(12.26-1.01)
- ITS114 安防市场每周千万项目(12.26-1.01)
- IOV114 运输信息化近期招标项目一览(12月NO.5)
- ITS114 智能交通市场每周千万项目(12.19-12.25)
- ITS114 智能交通市场500万以下项目(12.19-12.25)
- ITS114 公路信息化市场每周千万项目(12.19-12.25)
