《合作式智能运输系统应用集 第1部分:车辆辅助驾驶应用集(征求意见稿)》等2项国标征求意见
车辆协同驾驶应用集标准征求意见稿及编制说明:https://jtst.mot.gov.cn/kfs/file/downportal?md5=dd71aaad4f0f1ab1a05ce00c24d35d31 https://jtst.mot.gov.cn/kfs/file/downportal?md5=aac5e65ea65eb598f372715465be5c7b
车辆辅助驾驶应用集标准征求意见稿及编制说明:https://jtst.mot.gov.cn/kfs/file/downportal?md5=8060f10196d24cd080c7142fbf395295 https://jtst.mot.gov.cn/kfs/file/downportal?md5=442d63e7e06641d8277d8c035baef9c3
近日,ITS114获悉《合作式智能运输系统应用集 第1部分:车辆辅助驾驶应用集》(计划号:20202530-T-469)《合作式智能运输系统应用集 第2部分:车辆协同驾驶应用集》(计划号:20202532-T-469)两项国家标准已完成征求意见稿,正公开征求意见,截止时间为4月14日。应用集系列标准是《合作式智能运输系统专用短程通信》系列标准的拓展和延续,补足了缺乏具体应用场景的空缺,进一步澄清了对车辆辅助和车辆协同应用场景的认识。
车辆辅助驾驶应用集
《合作式智能运输系统应用集 第1部分:车辆辅助驾驶应用集》主要起草单位为交通运输部公路科学研究所、中国信息通信研究院、同济大学、信通院车联网创新中心(成都)有限公司、山东省交通规划设计院集团有限公司、上海机动车检测认证技术研究中心有限公司、上汽大众汽车有限公司、东软睿驰汽车技术(沈阳)有限公司、北京万集科技股份有限公司、重庆长安汽车股份有限公司、高通无线通信技术(中国)有限公司、电信科学技术研究院有限公司、北京星云互联科技有限公司、北京百度智行科技有限公司。
定义方面,车辆辅助驾驶应用是合作式智能运输系统通过自车、他车与路侧等数据来源,为驾驶员提供相关的交通预警信息,由驾驶员根据这些信息自行判断,进行驾驶操作;而车辆协同驾驶应用是在更加实时可靠、多方来源的数据(包括来自于自车、其他车辆、路侧设施、行人、自行车、宠物等弱势交通参与者以及云端和控制中心等)之上,对用户的驾驶操作和出行轨迹进行规划决策,甚至直接进行控制,以达到提高驾驶安全、增强交通系统的效率的目的。
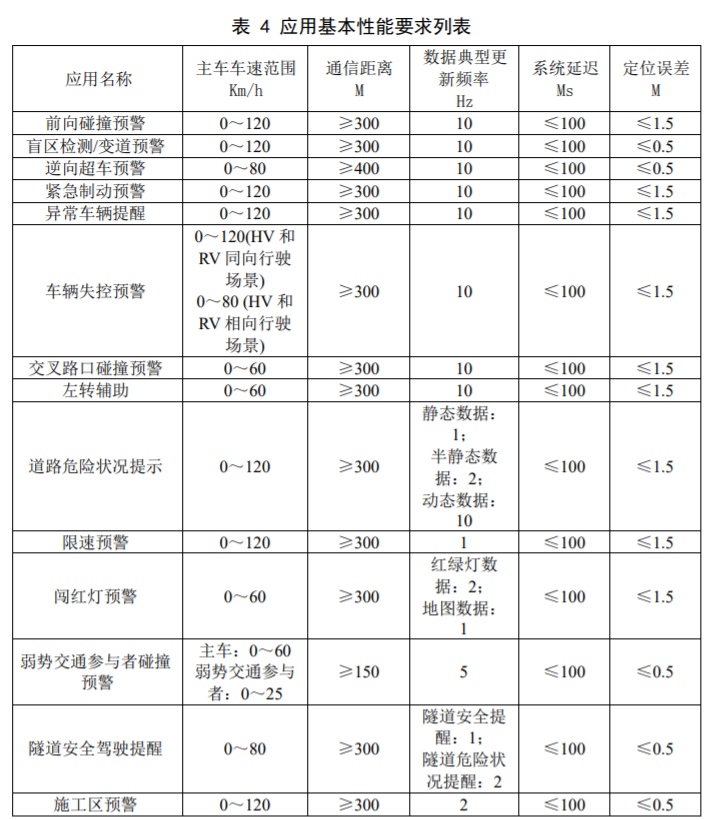
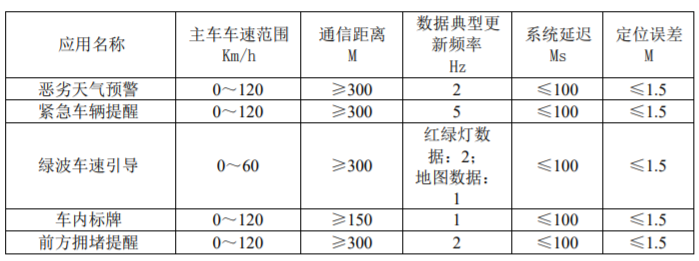
起草组根据车路协同发展趋势,增补部分场景,最终确定19个车辆辅助驾驶应用,其中安全类15个,效率类4个。
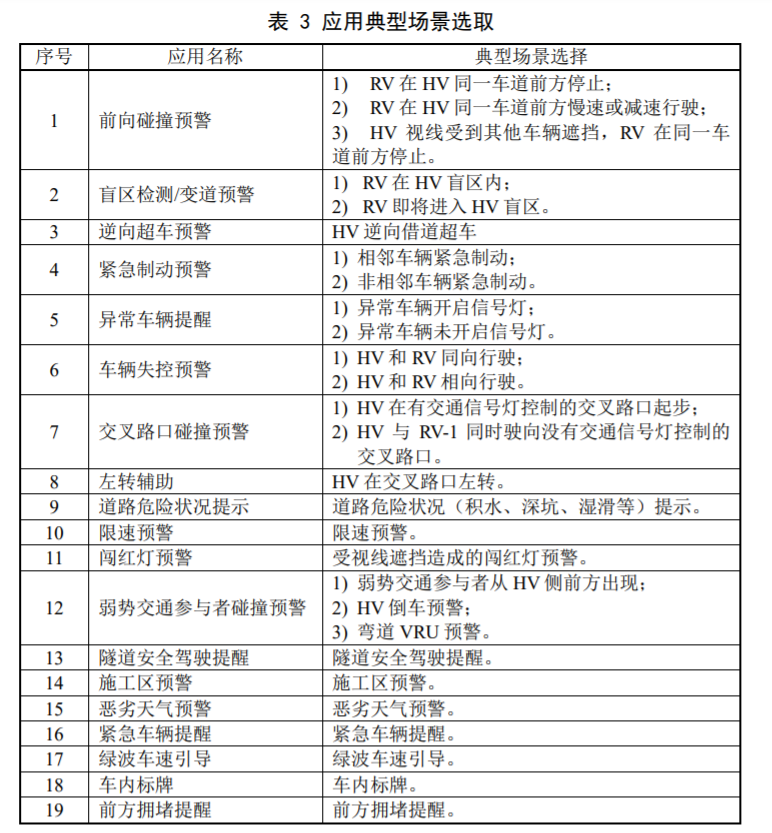
注:HV即HostVehicle,具备短程无线通信能力的主车。 RV即RemoteVehicle,具备短程无线通信能力的远车。
19个场景中,只能通过V2X技术实现的,包括变道预警、逆向超车预警、紧急制动预警、异常车辆提醒、车辆失控预警、交叉口碰撞预警、闯红灯预警、恶劣天气预警、紧急车辆提醒等,即无法通过导航地图、车载视觉获得的功能,这也应该是车路协同最有价值的地方,而这绝大多数都是通过V2V功能实现。即便是前方拥堵提醒,V2V能比导航地图更能精准获知信息,当然,前提是导致拥堵的原因是因为车辆故障、事故之类,且事故车辆带有V2X功能。异常车辆提醒、车辆失控预警、恶劣天气预警,组合起来,可以避免诸多事故发生,尤其是避免二次事故、连环追尾事故,类似春节前后在郑州、长沙发生的团雾、路面结冰导致的特大交通事故,如果有部分车辆实现了这些功能,那么至少可以降低事故带来的后果。
车辆协同驾驶应用集
《合作式智能运输系统应用集 第2部分:车辆协同驾驶应用集》主要起草单位为交通运输部公路科学研究所、电信科学技术研究院有限公司、同济大学、山东省交通规划设计院集团有限公司、北京星云互联科技有限公司、北京万集科技股份有限公司、中国信息通信研究院、信通院车联网创新中心(成都)有限公司、上汽大众汽车有限公司、东软睿驰汽车技术(沈阳)有限公司、北京百度智行科技有限公司、上海机动车检测认证技术研究中心有限公司。
该应用集最终包含9个应用场景,分为安全类、效率类、服务类和综合类,其中,针对场景分类增加场景适用道路类型。


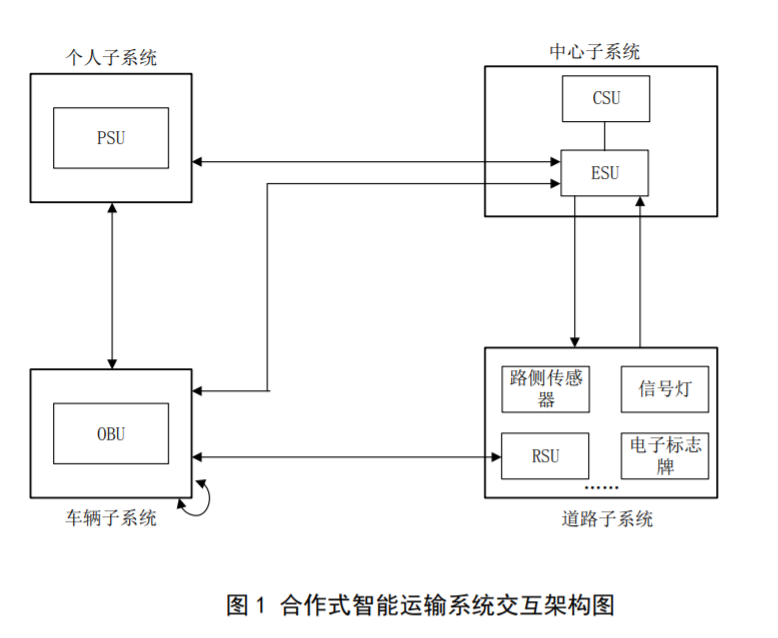
场景的系统实现主要以合作式智能运输系统交互为基础,包含四部分:个人子系统、中心子系统、车辆子系统和道路子系统。个人子系统包含个人服务单元(PSU)等设施设备,通过V2P通信方式将车辆信息传输给RSU,并接收控制指令的功能。中心子系统包括边缘服务单元(ESU)、中心服务单元(CSU)等设施设备,具备局部或全局交通信息服务与控制指令发布的功能。道路子系统包括RSU、路侧传感器、信号灯、电子标志牌等设施设备,应具备通过V2I通信方式为车辆和道路交通管理提供所需信息,并根据应用需求,通过RSU执行相应控制指令的功能。车辆子系统包括OBU等设施设备,应具备通过V2I或V2V的通信方式将车辆信息传输给RSU或车辆。合作式智能运输系统交互架构图见下图。
9个场景中,ITS114摘取合作式感知这一个场景的技术要求说明。
合作式感知
当交通参与者自身搭载或安装在路侧的感知设备与感知对象之间存在感知范围内的信息交互障碍时,能够借助协同感知的方式顺利完成目标检测。在与自身运动动态或路径规划信息结合后,发出安全预警或辅助自身做出正确的驾驶决策,实现交通事故和二次伤害的降低。对于自动驾驶车辆或手动驾驶车辆,合作式感知对提升驾驶安全和交通效率均具有重要的应用价值,具体可以体现在以下几个方面:
一是提供行车超视距服务。通过路侧多传感器部署,实现对多方位、长距离连续检测识别,并与AV主车感知进行融合,实现自动驾驶车辆对超视距范围内车辆或行人的准确感知识别,车辆可提前做出预判和决策控制,进而降低事故风险,行车超视距服务主要包括主动超视距视频传输、超视距可行使区域检测和超视距障碍物感知三个方面。
二是提供动静态盲区/遮挡协同感知。通过路侧多传感器部署,实现对多方位、长距离连续检测识别,并与AV主车感知进行融合,实现自动驾驶车辆对盲区内车辆或行人的准确感知识别,车辆可提前做出预判和决策控制,进而降低事故风险。
三是提供恶劣环境导致的超视距。大雨、大雪及雾天等极端环境造成的视野受限。主体车辆受恶劣天气影响,无法通过单车感知获取驾驶前方的路况及交通信息,车载传感器受视线、自然现象影响无法准确捕获感知信息,可通过V2I、V2V或V2N获取RSU或其他车辆的感知信息,与本车信息进行融合完成对路况及障碍物的判断,为主体车辆前向行车提供准确、实时的交通信息。
四是提供路侧信号灯融合感知。主体车辆可通过V2I、V2V或V2N获取交叉路口交通灯状态,可根据道路交叉路口交通灯情况及时调整路线,规划绿波带,提高行车效率。
五是提供道路交通事件/状态感知。主体车辆可通过V2I、V2V或V2N获取前方突发事故和路况拥堵情况,使得车辆提前进行预判和决策控制,如调整行车路线,变道绕行、停车,避免急刹或事故等风险,保障车辆驾驶安全。
本应用基于V2X通信,将应用场景分为两类:受遮挡而产生盲区场景和超视距感知的场景。实现了车辆的非视距感知和长距离感知,从而在发生碰撞风险之前,可以及时采取必要措施避免发生交通事故,保证行车安全。适用于城市道路、交叉路口、高速公路和封闭园区,属于安全+效率类的综合类应用。
合作式感知的典型应用场景如下:
场景基本性能要求和数据交互基本内容:
①车速范围本应用适用于城市道路、普通道路和高速公路等场景,基于《中华人民共和国道路交通安全法》对不同类型道路最高时速的规定,本场景车速范围限制在0~120Km/h。
②数据典型更新频率
数据典型更新频率为10Hz;参考《基于LTE的车联网无线通信技术总体技术要求》(YD/T3400—2018),加之目前行业内普遍认同符合此类应用车辆发送的动态消息典型更新频率为10Hz,因此该场景的数据典型更新频率要求为10Hz。
③系统延迟合作式感知的数据主要用车辆的主动安全,提示驾驶员存在碰撞风险或直接影响自动驾驶车辆的驾驶决策。典型的碰撞类场景预警的TTC通常为2~4s,基于通信的防撞系统的TTC预警时间应高于单车感知控制系统延时,系统延时的过大不利于网联车辆及时采取必要的措施,避免发生碰撞危险;考虑系统延迟指的是从V2X终端开始数据组包,到接收该数据组包并完成解析的时间段,特指应用层端到端的延迟时间,因此,该场景的系统延迟要求小于等于100ms。
④定位精度合作式感知的数据主要用车辆的主动安全,感知共享的数据直接用于主车的主动安全计算,因此要求感知数据的定位精度达到车道级的定位标准,即定位误差小于等于0.5m。
⑤数据交互基本内容合作式感知应用场景指的是主车通过V2X数据获取感知范围之外的交通参与者或交通事件信息;对于交通参与者,根据《合作式智能运输系统专用短程通信 第3部分:网络层和应用层规范》(GB/T31024.3—2019)中规定的路侧单元获取的周围交通参与者的信息可以通过RSM消息进行发送,具体内容包括位置(经纬度必选,海拔高度可选)、车头方向角、车体尺寸、速度、加速度、横摆角加速度和车辆类型等信息;对于交通事件信息,可以通过影响半径,交通事件编码,交通事件描述等字段进行描述。

延伸阅读!
VIP项目信息
- IOV114 运输信息化近期招标项目一览(2月NO.3)
- ITS114 智能交通市场每周千万项目(2.13-2.19)
- ITS114 智能交通市场500万以下项目(2.13-2.19)
- ITS114 公路信息化市场每周千万项目(2.13-2.19)
- ITS114 安防市场每周千万项目(2.13-2.19)
- 第五十批安徽省道路运输车辆动态监控社会化服务企业备案
- ITS114 智能交通市场每周千万项目(2.06-2.12)
- ITS114 智能交通市场500万以下项目(2.06-2.12)
- ITS114 公路信息化市场每周千万项目(2.06-2.12)
- ITS114 安防市场每周千万项目(2.06-2.12)
