防御性驾驶在交通事故预防之应用
一、背景概述
首先介绍一下关于交通安全中防御性驾驶的背景。上图中的柱状图表示了导致交通事故的原因的比例,明显可以看到产生交通事故最多的原因是未按规定让行,其次是无证驾驶、酒后驾驶等。在诸多影响交通安全的因素中我们可以将其分为两类,分别用橙色和蓝色标注。橙色代表传统概念中认为的严重违法行为,例如无证驾驶、酒驾、超速等等,这些行为是一种非常显性的交通违法行为。第二类蓝色标注的因素,如未按规定让行、未保持安全距离、操作不当、不安全超车、会车等,其本质并非是一种交通违法活动,本文更倾向于将其定性为一种不安全的驾驶行为。其典型表现是不遵守这种安全出行的行为规范,换而言之,人不具备安全驾驶的基本技能和意识。对于这种橙色的这种违法驾驶行为,可以依靠管理执法,严格执法,电子警察路面执法等方式去监督管理。而对这种蓝色代表的不安全驾驶行为,依旧单纯的依靠交通执法是没有效果的,因为安全驾驶意识和能力不会因为监管强度发生改变,所以现在我们更多的是要对驾驶者进行教育培训。执法和宣传教育培训相辅相成,前者是基础,后者是目的。
可以从最近发生的两个案例重新认识一下二者之间的联系和区别。第一个案例发生在今年夏天,事故表现为罐车超重后的稳定性失控。换个角度思考,从这个事故的诱因来看,导致罐车失控的直接原因是白色的小轿车违法停车。那么后车罐车司机的驾驶操作有无问题呢?其实问题也是很大的,从两个方面分析:第一,罐车司机没有能够提前预判到这个风险,没有发现前车的一个违法停车;第二,罐车司机的应急避让操作是大车司机中一直非常忌讳的操作方式。第二个案例是最近在朋友圈传播比较广的一个视频,可以看到这起事故的直接原因也是由于白色的小轿车在临近分流区的时候违法停车,但是也可以看到这个,紧接着它的这个大货车的操作也存在有问题。因为是直接向左的一个变道,而且急踩刹车,又导致后方的大客车避让不及。那么可以想象,假如这个大客车直接追尾,或者意外冲入对向车道,可能发生的是又一起特别重大的交通事故。
总结这两起事故其实都有一个明显的共同点,就是发生在高速公路的分流区。根据数据统计,交通事故中约有1/3的事故和高速公路的分流区相关,这是一个非常典型的高风险的路段。在这些事故中一些交通违法行为所导致的安全风险,由于没有被后续的驾驶者提前所预判,而引发诸多交通事故的连锁反应。在1950年,美国一个叫哈罗德·史密斯的学者提出了一个观点:“驾驶不在于手和脚,而在于眼睛和头脑”。在这里手和脚其实就是指代驾驶者最基本的操作技能,而眼睛和头脑其实代表的就是观察和判断,这与安全的驾驶意识是直接相关的。
后来哈罗德创立了一种称作防御性驾驶的概念。它是指车辆驾驶员能够准确地预测预见由其他车辆行人和道路状况等等所引发的危险,并且能够提前采取措施来化解行车风险,避免事故发生。这种驾驶的理念方法技术称之为防御性驾驶。防御性驾驶主要关注两个环节和两个目标,两个环节是指提前的预判和正确的处置;两个目标是指首先不主动和其他车发生碰撞,第二个是不被碰撞,简而言之就是在说第一个目标是不与其他人发生碰撞,第二个目标是自己也不会被撞击,这是安全驾驶的最终实现目标。
防御性驾驶还有五大原则,也称之为五大要领,主要是指在预判风险的这种基础上,放眼远方、留有余地、环顾四周、以及引人注意。此原则代表的是一种更多的安全意识,它需要具象到典型一些安全风险场景中进行应用,是一种所有事故分析后总结提高的一个概念。

早从1950年起,防御性驾驶从美国发源,然后逐渐向全球去拓展。近十年间在我国已经得到非常好的普及,特别在政府两个部委文件中都有对防御性驾驶概念的介绍,特别是现在通过网络、朋友圈等都可以了解到防御性驾驶价值的一些资料,有关内容逐步深入人心。
但现阶段存在的问题是,传统开展的防汛驾驶的交通安全教育、训练等往往是依赖授课、视频讲座形式或者通过书面知识的相关材料进行。这种教育形式的效果往往不能收到良好的教育效果,因为防御性驾驶虽然是一种偏理念的介绍,但是更重要的是要把这种理念落实到一些具体的操作中去。通过查阅资料发现,在国外往往是采用这种实车真实场地的体验驾驶,收到的效果最好。但是对照我国国情可知,我国现阶段并不能投入很大的资金和场地去进行这种训练。
现在有一种技术VR是通过展示模拟技术营造一个虚拟的驾驶环境,实现对交通场景、车辆特性、控制反馈等模仿,并能与之进行实时交互,体验真实驾驶感受。真实性、交互性、沉浸性,安全性、便捷性,是一种可复制性的开展方向驾驶训练的优良载体。
二、技术实现
第二部分介绍一下在做的此种科研项目,即如何通过VR来实现防御驾驶的这种训练和体验。
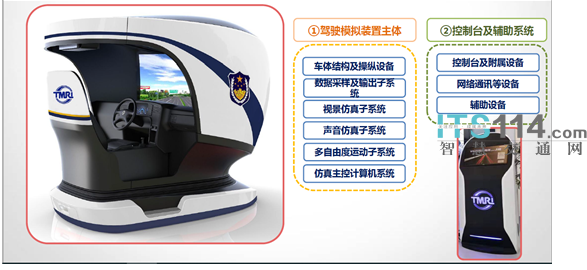
技术实现包括硬件和软件两个部分,在硬件部分主要就是能够提供这种半包围式模拟车辆这个整体结构,采用实际车辆的这种操控部件,包括模拟实车座舱,操控部件改造、带弧幕的3D立体投影系统等。设备具备诸多功能的原因是为了给驾驶员能够提供贴近实车的驾驶环境、良好的操控沉浸感、高逼真度的互动体验感受。
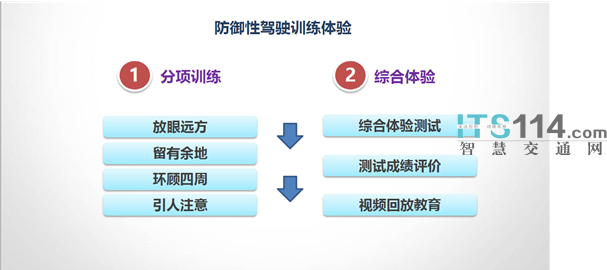
在软件部分,也是这套系统的最核心部分,分成了两个大的模块,第一称之为分项的体验训练,就是按照图中五个原则逐一的来进行训练。第二个模块是一个综合体验,根据这些原则测试各种典型的风险场景,通过这种方式来进行一个综合的测试,并最后进行一个综合评价。
1.分项训练
(1)放眼远方(保持安全视野)

分项训练中,第一项称之为放眼远方,它的内核是要保持一个安全的视野。实现方式主要是基于对当前视野内包括车辆,非机动车,也包括行人等,实时的来计算车头时距。然后对其进行三个分区,分别用红、黄和绿三个区域来表示三秒、六秒和九秒,这是传达给驾驶员的一个概念,即在画面中黄色和绿色距离下是处于是相对比较安全距离;红色的距离代表是已经非常危险的状态。通过这种直观的方式,帮助驾驶员去训练纵向的空间距离判断,以及培养驾驶员观察远方的视觉行为习惯。通常提及的行车时越过前车看前车,就是指跟车行驶时不能只观察前方车辆。因为一旦前方车辆有一个突然制动,或者有一个突然的变道,那么与前车的事故风险距离就会变得非常近。
(2)留有余地(保持安全空间)
分项训练的第二项是留有余地,它的内核是保持安全的空间。不仅包括纵向行驶,也包括横向车辆观察。主要是通过车身随车动的一个动态包围和碰撞检测技术,用不同的颜色来进行区分。当车辆处于相对比较安全时,它的包围显示颜色为绿色;当跟车比较近,或者和相邻车道的距离比较近时,采用红色来进行一个直观的显示,留有余地主要就是帮助驾驶员来训练对空间环境的感知能力,判断何种状态属于安全的,何种状态是不安全的。这个颜色区域的大小能够随车速变化而随时进行变化调整。
(3)环顾四周(识别潜在危险源)
分项训练的第三项是环顾四周,内核是识别潜在的危险源。一个基础实验思路是对所有当前视野内的行动轨迹来进行拟合测算,展现出一个直观的标识。当行动轨迹和本车的行动方向发生交织或者发生碰撞,会集合表现出图形提示。通过这种方式让驾驶员对这个场景中潜在危险源有一个提前判断。因为很多情况下驾驶员可能注意不到,比如公交车前边突然出现行人,因此提前把行人预测的一个行动轨迹标画出来,这些体验者能够知道典型的风险点的所在位置。
(4)引人注意(信息预警交互)
分项训练的第四项是引人注意,真实道路上需要通过喇叭、灯光等及时和周围的交通参与者进行一个预警的信息交互。本项目模拟了这个周围的注意力的关注区,比如随着开灯、嗯鸣喇叭等周围的关注区都会有所调整,通过这种训练培养驾驶员主动的意识即和旁边的交通参与者需要有这种信息交互的过程。
2.综合体验
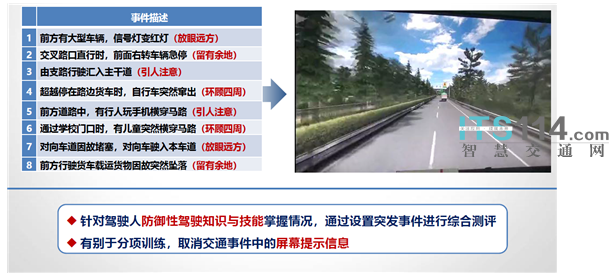
第二个部分是一个综合体验,这里不再区分具体的某项原则,也不再进行任何屏幕提示,而是一个综合性的训练体验。比如此案例中一个高速公路状态下,前方道路上行驶车辆突然有货物脱落。驾驶员需要要对这种比较典型的风险有一个提前判断,然后判断如何进行一个安全处置。
三、关键技术
第三个方面是在研究中所采用的一些关键技术。
1.视景内AI体距离计算
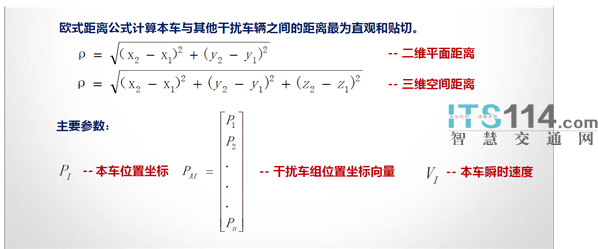
第一个技术是视景内AI体的计算,前面也提到预防远处状况时需要随时计算和其他车辆和人员的距离,包括空间距离和时间距离。欧式距离公式计算本车与其他干扰车辆之间的距离。随时进行计算,按照三秒六秒九秒来赋予这种不同时间的不同距离的一个颜色区分。
2.安全空间碰撞检测识别

第二个是安全空间碰撞检测的识别。通过对此进行了一个研究比选,最后采用方向包围盒来实现。方向包围盒主要是和速度有关系,所以需要把速度量带入后进行实时计算。然后一旦检测到距离比较近,它就会有一个颜色的改变。
3.运动轨迹拟合
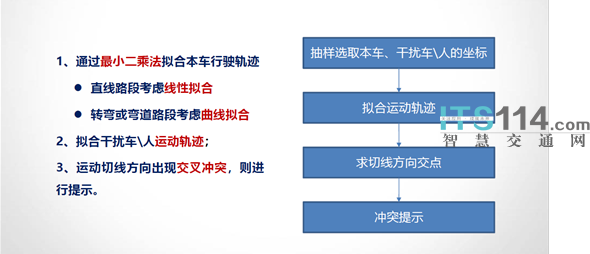
第三个是本车与其他的运动轨迹拟合,通过最小二乘法进行拟合。
4.车辆反转向力反馈模拟
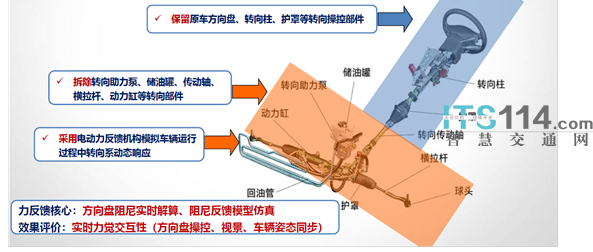
第四个技术是关于硬件的技术-车辆转向力反馈模拟。这种方向盘的阻尼和力反馈主要是通过前轮的滚动和前轮前束来实现的。在模拟境当中完全要靠里面的电机来进行仿真,而且同时考虑到行车速度和道路状况的情况,包括电机模拟转动的这种角度都息息相关。这种问题实际工程上非常难以去仿真实现的因此现在通过不断的优化开发的一个计模型来不断逼近这种真实的驾驶感受。
四、应用与展望
此系统现已在全国的部分省市进行应用,主要是应用于对记满12分和职业驾驶员的一个再教育和再培训。
1.受教群体特征
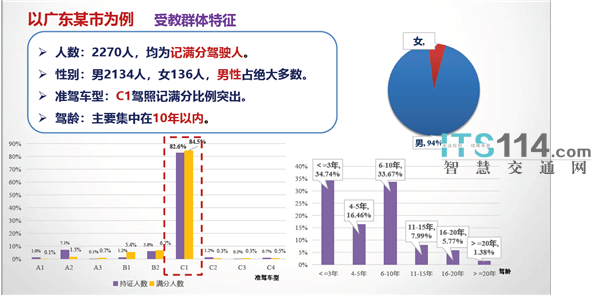
以广东某市为例,主要对记满12分的驾驶员进行教育。可以看到能够对记满12分驾驶员分析发现有一些特点。例如调查近两个月的一个体验数据,可以看到记满12分的男性驾驶员占94%为绝大多数,而女性驾驶员占比较少只有6%。所以,现今路面上存在交通违法比较多或者比较严重的行为的驾驶员仍以男性驾驶员为主。第二、从准驾车型来看,以C1车辆为主,记满12分的满分比例比持证比例仍相对较还高。从驾龄角度分析,三年以下驾龄的驾驶员仍占到总数的1/3以上,6到10年的驾驶员超过了总数的1/3。可以看出,十年以下驾龄的驾驶员安全意识和素质相对于老驾驶员薄弱。
2.受教情况
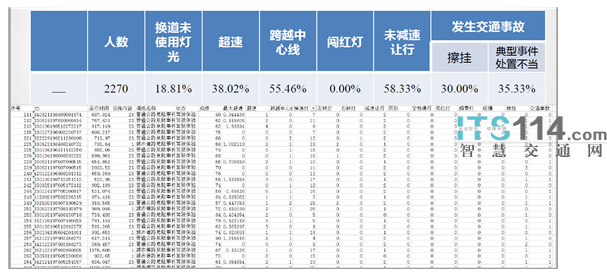
从受教时的体验数据来分析,换道未使用灯光是比较常见的一种交通陋习,通过驾驶模拟过程也反映的较为清楚。虽然闯红灯发生概率为0,但包括超速、跨越中心线等概率较高,而且由于典型事件的处置不当从而引发事故的比率占到35%,其实从反面证明了需要开展防御性驾驶教育的意义所在。
对具体分析记满12分的驾驶员分析中可以发现,事故的产生与驾驶员的驾驶技能其实没有太大关系,但还是表现为有违法行为和有不安全驾驶行为以及缺乏对复杂情况的一个正确预判和应急处置。
实际应用和展望中,现在对于驾驶员的这种教育培训,往往偏传统的仍以书本课堂或者以视频教育为主,但实际上在行为学或者心理学上已经有很多先进的或者说比较成熟的理论和理念可以供借鉴参考。比如危险预测、计划行为等。作为跨学科的行业领域需要更多的从教育学、心理学、社会学等等,借鉴优秀理念,用于驾驶员的教育和培训。此外在内容中也已经提到,现在都很熟悉基本的法律法规,像应急处置、风险防控,包括心理干预等在内的诸多方面是需要下一步重点去开拓的方向。在技术部分,现有的很多技术,例如VRARM、裸眼3D等其实都可以更好地被利用,为丰富开展驾驶员的行为教育,提供了非常好的技术支持。
本报告来源于2019年第十四届中国智能交通年会,未经本人确认。
本文作者:公安部交通管理科学研究所主任 高岩副研究员

延伸阅读!
VIP项目信息
- 公路信息化之800万以下中标项目汇总(4.1-4.15)
- ITS114 智能交通市场每周千万项目(3.29-4.04)
- ITS114 智能交通市场500万以下项目(3.29-4.04)
- ITS114 公路信息化市场每周千万项目(3.29-4.04)
- ITS114 安防市场每周千万项目(3.29-4.04)
- IOV114 运输信息化近期招标项目一览(4月NO.1)
- ITS114 智能交通市场每周千万项目(3.22-3.28)
- ITS114 智能交通市场500万以下项目(3.22-3.28)
- ITS114 公路信息化市场每周千万项目(3.22-3.28)
- ITS114 安防市场每周千万项目(3.22-3.28)
