自由流收费视频车辆判别系统探究
摘要:自取消全国高速公路省界收费站、联网收费系统并网切换以来,高速公路ETC用户通行量急剧增加,然而,用户端设备故障、不规范使用通行介质等因素极易造成通行费的漏收。同时,ETC门架车牌抓拍系统作为收费系统的重要稽查手段,捕获率、识别精准率因受天气环境、光线角度等因素影响,难以满足收费系统对车牌识别的精度要求。本文针对如何充分利用、挖掘ETC门架上的视频车辆抓拍数据进行了深入分析,探究并开发自由流收费视频车辆判别系统,为收费系统提供较高捕获率、识别精准率的视频车辆抓拍数据,为运营单位提供具有较高价值的稽查数据,有效减少通行费损失,具有显著的经济效益。
高速公路联网收费系统通过OBU或CPC卡,与ETC天线进行无线数据交互,完成通行费的计费,实现自由流分段计费和收费。ETC门架系统天线数据交互使用5.8GHZ频段通讯,频段频率较高,无线信号易被屏蔽,影响数据通讯。OBU刻意屏蔽、拆卸OBU、OBU损毁、CPC卡损毁、天线故障等,也易造成门架无交易或交易失败。这些情况主要发生在用户端上,不受收费系统约束和控制,往往导致通行费损失,因此,亟需强大的稽核系统作为强力支撑。作为目前收费系统的重要稽查手段,ETC门架车牌抓拍系统的捕获率、识别精准率因受天气环境、光线角度等因素的影响,难以满足收费系统对车牌识别的精度要求,因此需要进一步利用、挖掘ETC门架上的视频车辆抓拍数据,提高车牌识别数据准确性,为收费系统提供较高价值的稽核数据,有效减少通行费损失。
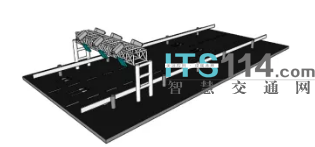
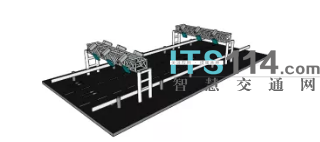
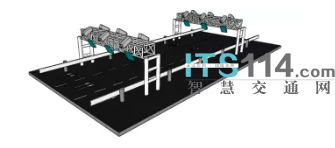
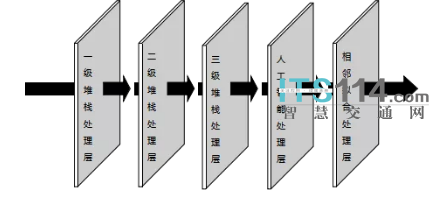
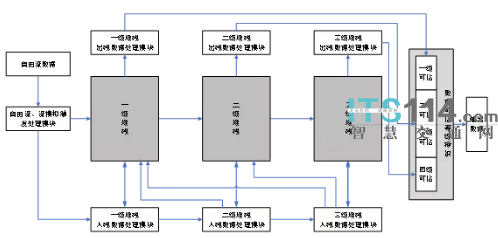
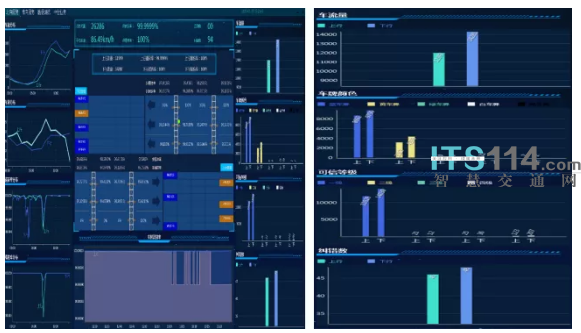
一、系统现状 二、自由流收费视频车辆判别系统 (一)设备冗余对视频抓拍系统性能的影响 ETC门架系统建设,各省份依据自己的具体情况,主要有以下四种方案,采用单门架单排摄像机、单门架双排摄像机,双门架系统,第一个门架安装两排摄像机、第二个门架安装一排或二排摄像机。 (1)单门架单排摄像机对过路车辆有一次抓拍机会,抓拍角度、前后车辆遮挡、光线明暗变化等因素对车辆的捕获率、识别精准率都会造成不可逆转的影响,摄像机捕获率和识别精准率一般在70%到99%之间波动。单门架单排摄像头如图1所示。 图1 单门架单排摄像头示意图 (2)相对单排摄像机而言,单门架双排摄像机增加了一次对过路车辆抓拍机会,并改善了抓拍角度、前后车辆遮挡、光线明暗变化对车辆捕获率、识别精准率的影响。可利用算法,提高部分数据的可信度,系统的捕获率可提高到90%以上。但不宜建立数学分析运算,因此对识别精准率改善不明显。单门架双排摄像头如图2所示。 图2 单门架双排摄像头示意图 (3)双门架三排摄像机,相对单排摄像机而言,对路过车辆增加了两次抓拍机会,再加上两排门架之间间隔一般在500米以上,因此,对路过车辆抓拍角度逆光反射的影响,以及遮挡、雨雪、雾霾等因素造成的无法抓拍或识别错误的影响,有明显改善。系统的捕获率和识别的精准率都得到明显提升,系统的捕获率和精准率都可提高到97%到99.9%之间。此外,三个抓拍数据,为数学分析计算提供了可能。因此系统再辅以适当的算法,识别精准率可提高到99%到99.9%之间。双门架三排摄像头如图3所示。 图3 双门架三排摄像头示意图 (4)双门架四排摄像机时,相对单排摄像机而言,对路过车辆增加了三次抓拍机会。四排摄像机从不同角度、不同时间对路过车辆进行抓拍,弥补了单个摄像头受光线、角度、遮挡、雨雪等因素造成性能下降的不足。同时,由于提供了四组抓拍数据,为数学分析运算,提供了足够的依据,系统的性能得到了充分的提高,性能指标稳定可靠,捕获率和识别精准率都可提高到99%以上。双门架四排摄像头如图4所示。 图4 双门架四排摄像头示意图 (二)数据分析运算方法对视频抓拍系统性能的影响 1、视频抓拍系统的捕获率分析 采用单门架或者采用双门架、安装一排或二排或三排或四排摄像头,不管采用哪种组合方式,一旦确定了组合方式,视频抓拍系统的捕获率就基本已经确定,假设单个摄像头的捕获率为90%,那么多排摄像头时的捕获率如下所示。 一排摄像头捕获率:C1=90%。 二排摄像头捕获率:C2=C1+(1-C1)×90%=99%。 三排摄像头捕获率:C3=C2+(1-C2)×90%=99.9%。 四排摄像头捕获率:C4=C3+(1-C3)×90%=99.99%。 从以上计算可以看出,单个摄像头的捕获率在90%,而四排摄像头时的捕获率,理论计算可以高达99.99%以上。多排摄像头提升捕获率效果显著。 2、视频抓拍系统的识别精准率分析 采用多排摄像头,一辆路过的车辆会产生多组抓拍数据,受各种因素的影响,会出现数据漏抓、完全正确的数据、有误的数据等各种数据组合。但可以把这些数据当做一个整体,相互佐证,互为影响,以此确认系统数据的正确性。当有误数据出现时,可以采用不同的数学分析运算,来校正数据,提炼出正确的抓拍数据,以期提高系统的识别精准率。以下对不同的门架摄像头安装设置、抓拍成功次数、抓拍数据进行分析。 假设过路车辆的车牌为:浙GQD312。 (1)一组抓拍数据(或单门架单排摄像头设置) 抓拍的数据可能是以下的其中之一。 识别正确:浙GQD312。 识别有误:浙G0D312。 数据的可信度,有可能是正确的,也有可能是有误,此时,系统无法确认,把这组数据定义为,可信度4级。 (2)二组抓拍数据(或单门架双排摄像头设置) 抓拍的数据可能是以下组合的其中之一。 2次识别都正确:如浙GQD312、浙GQD312。 其中1次识别有误:如浙GQD312、浙G0D312。 2次识别都有误:如浙GQDB12、浙G0D312。 数据可信度:2次识别都正确,系统可认为数据正确,把这组数据定义为,可信度1级。1次、2次有误时,系统无法确认数据的正确性,把这组数据定义为,可信度3级。 (3)三组抓拍数据(或双门架三排摄像头设置) 抓拍的数据可能是以下组合的其中之一。 3次识别都正确:如浙GQD312、浙GQD312、浙GQD312。 其中1次识别有误:如浙G0D312、浙GQD312、浙GQD312。 其中2次识别有误:如浙G0D312、浙GQ0B12、浙GQD312。 3次识别都有误:如浙G0D312、浙GQ0312、浙GQDB12。 数据可信度:3次都正确或者2次都正确,系统可以确认数据的正确性,把这组数据定义为,可信度1级。2次以上数据有误,系统无法确认数据的正确性,把这组数据定义为,可信度2级。 (4)四组抓拍数据(或双门架四排摄像头设置) 抓拍的数据可能是以下组合的其中之一。 4次识别都正确:如浙GQD312、浙GQD312、浙GQD312、浙GQD312。 其中1次有误:如浙G0D312、浙GQD312、浙GQD312、浙GQD312。 其中2次有误:如浙G0D312、浙GQ0312、浙GQD312、浙GQD312。 其中3次有误:如浙G0D312、浙GQ0312、浙GQDB12、浙GQD312。 4次识别都有误:如浙G0D312、浙GQ0312、浙GQDB12、浙GQD317。 数据可信度:4次、3次、2次正确,系统可以确认数据的正确性,把这组数据定义为,可信度1级。3次、4次有误,系统无法确认数据的准确性,把这组数据定义为,可信度2级。 由以上分析可知,可信度1级的数据为系统确认正确的数据。可信度2级、3级、4级的数据,为系统无法确认的有误数据。有误数据直接影响系统的识别精准率。通过数理统计分析,建立数据模型,将可信度2级、3级、4级数据,最大程度转化为1级可信度数据,减小有误数据数量,可提高系统数据识别的精准率。 (三)视频抓拍系统核心数据分析模型 图5 多层数据处理结构示意图 根据对多门架多排摄像头设置的视频抓拍系统数据的分析,构建一个由一级、二级、三级堆栈处理层、人工智能处理层、相邻拟合处理层所组成的多层数据处理结构的分析模型,结构如图5所示,将自由流视频抓拍数据,经数学分析模型处理,可实现对数据的纠错、清洗去重、数据重构、数据提炼,输出高可靠、高精准、纯净的车辆抓拍数据。视频抓拍系统核心数据分析模型如图6所示。 图6 视频抓拍系统核心数据分析模型示意图 核心数学分析模型主要由三个堆栈处理层所组成,一级堆栈堆砌了1级可信度数据,二级堆栈堆砌了2、3级可信度数据,三级堆栈堆砌了4级可信度数据。自由流视频抓拍数据流经第一堆栈处理层,系统调用一级堆栈入栈数据处理模块,并遍历一级堆栈的所有数据,如有相同或拟似相同的,清洗入栈数据并结束入栈数据处理;如果都没有,触发二级堆栈入栈数据处理模块。 自由流视频抓拍数据流经第二堆栈处理层,遍历二级堆栈的所有数据,如有相同数据,就将该入栈数据分拣到一级堆栈最底部的第一个数据单元中,同时清洗掉二级堆栈相应记录,结束入栈数据处理;如有拟似数据,就将数据入栈,结束入栈数据处理;如果既没有相同数据,也没有拟似数据,触发三级堆栈入栈数据处理模块。 自由流视频抓拍数据流经第三堆栈处理层,遍历三级堆栈的所有数据,如有相同数据,就将该入栈数据分拣到一级堆栈最底部的第一个数据单元,同时清洗掉三级堆栈的记录数据,结束入栈数据处理;如果有拟似数据,就将入栈数据、三级堆栈的拟似数据,分拣到二级堆栈最底部的数据单元中,清洗掉三级堆栈的拟似记录,结束入栈数据处理;如果既没有相同的,也没有拟似的,就将数据入栈,结束入栈数据处理。 自由流视频抓拍数据同时触发了一级堆栈出栈数据处理模块,输出1级可信度的抓拍数据。 自由流数据也触发了二级堆栈出栈数据处理模块,当有出栈数据时,检查二级堆栈出栈数据,如果有3组数据,就对3组的车牌数据进行表决,获取一个新的车牌数据。通过表决,可以校正错误的数据位,标识这个新的数据为2级可信度车牌数据,同时清洗掉该3个出栈数据。如果只有2组数据,就通过比对摄像机提供的可信度进行评估,可信度高的标识为3级可信度抓拍数据,清洗掉另一个数据,结束二级堆栈出栈数据处理。 自由流视频抓拍数据同时触发了三级堆栈出栈数据处理模块,当有出栈数据时,标识该数据为4级可信度抓拍数据,结束三级堆栈出栈数据处理。 从视频抓拍系统核心数据分析模型的计算过程可以清楚地知道,1级可信度数据是完全正确的数据,2级可信度数据为良好的数据,3、4级可信度数据为不及格的有误数据。进一步分析可知,在一个双排四摄像头设置的门架系统中,产生4级可信度数据的图像,最大可能是被遮挡的车辆图像。遮挡部分车牌数据,是用摄像头猜想数据填入的,某个摄像头的模糊图像数据,也是摄像头猜想填入的。由于和正确的数据产生较大的差距而演变成4级可信度,而实际正确的车牌已经被其他摄像头捕获并被识别。因此实际统计时,应剔除4级可信度数据,最终影响识别精准率的只有3级可信度的数据。经过三个堆栈处理层的处理,实现了数据的清洗、纠错和重构。 (四)人工智能AI 经视频抓拍系统核心数据分析模型处理,还存在一部分2级、3级、4级可信度的抓拍数据,通过进一步采用人工智能AI技术,对已经记录保存的抓拍图像进行人工智能识别,获取一个新的识别数据,结合原有数据,再次经视频抓拍系统核心数据分析模型处理,提升数据可信度到1级,最大程度地减少低信用级别数据量,进一步提高系统的识别精度。 (五)相邻拟合补漏 如果在一个虚拟点,车辆没有被捕获,即出现漏拍,则采用相邻虚拟点的数据,进行拟合运算,加以距离、行驶时间等因素综合判断补漏,进一步提高系统的捕获率。 三、视频车辆判别系统的应用测试 浙江省某高速公路的7个ETC门架已安装和实施本文所述的视频车辆判别系统,并投入运行,获取了大量测试数据,测试原理和测试结果如下所示。 (一)测试原理 1、捕获率测试原理 假设系统有4排摄像头,每排有3个摄像机,取S个样本,样本是由视频车辆判别系统提供的,那么,针对这些样本,可以分析出每排摄像头捕获到的次数M,由此可得,每排摄像头的捕获率C=M/S。四排摄像机,就有4个排捕获率,C1、C2、C3、C4。 然后,按照数理统计计算方法,就可得出系统的捕获率。 车辆经第一排摄像头时的捕获率:SC1=C1 (1) 车辆经第二排摄像头时的捕获率:SC2=SC1+(1-SC1)×C2 (2) 车辆经第三排摄像头时的捕获率:SC3=SC2+(1-SC2)×C3 (3) 车辆经第四排摄像头时的捕获率:SC4=SC3+(1-SC3)×C4 (4) 系统总捕获率:SC=SC4 (5) 2、识别精准率测试原理 假设系统有4排摄像头,每排有3个摄像机,取S个样本,每个摄像头对样本精准匹配数量A,模糊匹配数量V,各摄像头精准率D=A/(A+V)。 (1)各摄像头精准率 D11=A11/(A11+V11) (6) D12=A12/(A12+V12) (7) D13=A13/(A13+V13) (8) D21=A21/(A21+V21) (9) D22=A22/(A22+V22) (10) D23=A23/(A23+V23) (11) D31=A31/(A31+V31) (12) D32=A32/(A32+V32) (13) D33=A33/(A33+V33) (14) D41=A41/(A41+V41) (15) D42=A42/(A42+V42) (16) D43=A43/(A43+V43) (17) (2)按数理统计方法,计算可得每排的识别精准率如下所示。 第一排摄像头整体识别精准率D1=(D11×D12×D13)1/3 (18) 第二排摄像头整体识别精准率D2=(D21×D22×D23)1/3 (19) 第三排摄像头整体识别精准率D3=(D31×D32×D33)1/3 (20) 第四排摄像头整体识别精准率D4=(D41×D42×D43)1/3 (21) (3)按数理统计方法,进一步计算可得系统的识别精准率如下所示。 经第一排摄像头后的精准率:DS1=D1×C1 (22) 经第二排摄像头后的精准率:DS2=DS1+(1-DS1)×C2×D (23) 经第三排摄像头后的精准率:DS3=DS2+(1-DS2)×C3×D3 (24) 经第四排摄像头后的精准率:DS4=DS3+(1-DS3)×C4×D4 (25) (4)系统的识别精准率:DS=DS4 (26) (二)数据测试 基于以上对数学分析模型和数理统计方法的分析,开发了一款测试软件,视频车辆抓拍数据经数学分析模型分析、人工智能处理后,再通过数理统计语言,展示数据统计、数据分布以及即时数据变化,以验证研究应用效果。下文对其中一个虚拟点从当天0点开始到当天测试时间之间的整点测试数据,进行展示和分析。视频车辆判别系统软件测试及数据统计,如图7所示。 图7 视频车辆判别系统软件测试及数据统计展示图 1、数据统计 从数据统计展示图可以得出以下数据。 (1)上行流量:11874。 1级可信度数据:11828。2级可信度数据:21。3级可信度数据:25。 (2)下行流量:14126。 1级可信度数据:14078。2级可信度数据:12。3级可信度数据:36。 (3)根据数学分析模型,通过统计数据可以计算得出: 上行方向识别精准率为99.79%;下行方向识别精准率为99.74%。 从纠错数据统计结果可知,系统对上行数据应纠错46条,纠错成功21条,纠错成功率45.65%;对下行数据应纠错48条,纠错成功12条,纠错成功率25%。 2、数据分布 数据分布展示区,展示了一个虚拟点流量、车速、捕获率、识别精准率随时间变化的分布情况,如图8所示。由图可见,在测试时间段内,捕获率在99.99%到100%之间波动,识别精准率在99.98%到100%之间波动。捕获率、识别精准率是采用数理统计分析语言展示的数字分布,实际统计计算数值和其相比存在一定的统计误差,实际统计的数值比数据分布展示的略低0.24%,符合实际情况,也在允许的、可接受的误差范围内。 图8 数据分布展示图 3、即时数据 即时数据展示区,展示了当时每个摄像头的识别精准度、每排摄像头的识别精准率、每排摄像头的捕获率,以及一个虚拟点当时的总捕获率、总识别精准率。即时数据展示区,可为管理者即时展示视频各设备性能、组合设备性能,以及一个虚拟点整体设备性能,为管理人员展示了设备工作状况,为设备的维护保养提供直观的指导依据。即时数据展示如图9所示。 图9 即时数据展示示意图 四、结束语 作者:袁毅(宁波招商公路交通科技有限公司) (原文刊载于2020年第7期《中国交通信息化》)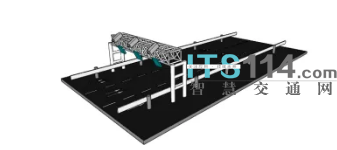



延伸阅读!
VIP项目信息
- 公路信息化之800万以下中标项目汇总(4.1-4.15)
- ITS114 智能交通市场每周千万项目(3.29-4.04)
- ITS114 智能交通市场500万以下项目(3.29-4.04)
- ITS114 公路信息化市场每周千万项目(3.29-4.04)
- ITS114 安防市场每周千万项目(3.29-4.04)
- IOV114 运输信息化近期招标项目一览(4月NO.1)
- ITS114 智能交通市场每周千万项目(3.22-3.28)
- ITS114 智能交通市场500万以下项目(3.22-3.28)
- ITS114 公路信息化市场每周千万项目(3.22-3.28)
- ITS114 安防市场每周千万项目(3.22-3.28)
