汽车雷达、激光雷达、摄像头等感知元件的整车方案集成研究
为了实现无人驾驶汽车的功能要求,需要在整车上集成多个种类的感知元件,用于感知车辆周边环境。文章对无人驾驶汽车的主要感知元件进行介绍,并结合不同种类感知元件的工作特性和限定条件,分析了各种感知元件在整车集成时需要注意的事项,为将来的批量设计和制造无人驾驶汽车提供参考。
无人驾驶技术是各大汽车企业乃至互联网企业争相布局的战略产业,各大汽车企业纷纷制定了无人驾驶的路线目标,包括宝马、奥迪、大众、特斯拉、谷歌、百度等在内的多家汽车企业和互联网新贵都在这一领域投入大量资源。
从目前的发展情况来看,L4 级无人驾驶技术还没有真正地进入商用阶段,各企业对于如何实现这一技术也众说纷纭。
总的来看,传统汽车企业主要通过继续发展车联网和 ADAS 系统技术来实现无人驾驶; 互联网公司主要在人工智能和GPS 地图领域两方面发力。但不管最终选择的是哪种发展路线,都需要在汽车上集成感知元件来感知周边环境信息。
本文将主要阐述目前无人驾驶技术应用的重要感知元件,介绍其常用布置位置,在批量车型设计过程中需要考虑的周边环境和技术因素,以及对整车系统集成的影响。
无人驾驶汽车的主要感知元件
无人驾驶系统分为 3 个层级: 感知层、决策层和执行层。无人驾驶汽车的雷达和摄像头属于感知层的范畴,系统通过它们实现对车辆周围环境的感知识别,为后续的驾驶员行动规划和路线规划等决策活动提供支持。常用的感知元件包括毫米波雷达、激光雷达、摄像头和超声波雷达等。
从目前大多数无人驾驶汽车的技术方案来看,激光雷达对周围环境的三维空间感知完成了60% ~ 75% 的环境信息获取,其次是相机获取的图像信息,再次是毫米波雷达获取的定向目标距离信息,以及 GPS 定位及惯性导航获取的无人车位置及自身姿态信息,最后是其他超声波传感器、红外线传感器等其他光电传感器获取的各种信息。
奥迪 A8 在上市之时宣称已经达到了 L3 级的无人驾驶级别。为了实现 L3 级别功能,整车配备了多种不同功能的感知元件。
真正高度自动化驾驶的起步级别应该是 L4 级无人驾驶。各大主流汽车企业和互联网企业致力实现的也是 L4 级及其以上级别的无人驾驶。典型 L4 级无人驾驶车辆布置的感知元件如图 1 所示。
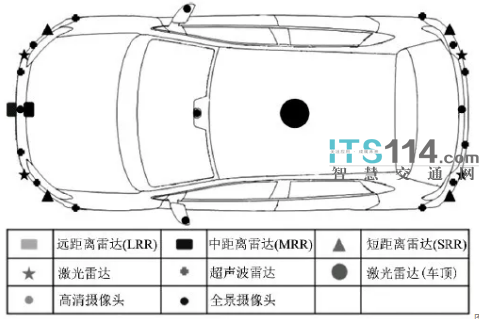
图1 无人驾驶感知元件示意图
整车集成感知元件的要求
毫米波雷达、激光雷达、摄像头和超声波雷达原理各有不同,在整车集成的过程中,需要结合不同感知元件的工作特点和限制条件,综合考虑整车性能方面的要求,开展合适的整车集成方案工作。总体来说,在整车系统集成时,应当主要考虑以下 4 点。
( 1) 根据感知元件的工作性能和技术参数,确定模块的固定位置和固定方式;
( 2) 考虑与周边零件的匹配,满足感知元件的探测范围要求、感知元件对周边零件的相关技术要求以及造型要求;
( 3) 需要根据雷达的工作特性和局限性,考虑布置或预留清洗和加热功能,保持感知元件和整车系统在异常工况下的功能;
( 4) 尽管无人驾驶技术的最终目标是消除交通事故,但在实际驾驶过程中,很难避免交通事故的发生。为了尽可能保护感知元件,降低汽车轻微( 低速) 碰撞后的维修成本,还需考虑在低速碰撞过程中对感知元件的保护。
我国对于低速碰撞的法规要求是 GB 17354 -1998《汽车前后端保护装置》,根据该法规规定,碰撞实验时整车分别处于“整备质量”和“加载试验车质量”状态,碰撞摆锤的基准高度为 445 mm,摆锤的形状如图 2 所示。在布置感知元件的时候,需要考虑到该法规的约束条件。
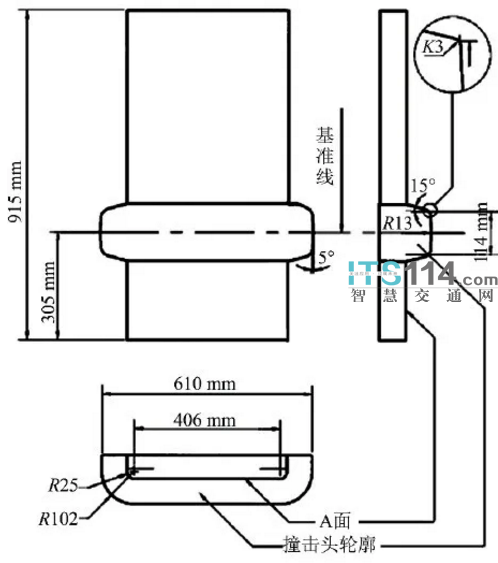
图2 GB 17354-1998摆锤轮廓
此外,整车集成感知元件时还需要考虑周边零件造型、零件缝道匹配、线束布置方案等多方面因素,必须综合进行考量才能获得最合适的整车集成方案。
毫米波雷达的整车集成方案
毫米波雷达是工作频率在 30 ~ 300 GHz( 波长为 1 ~ 10 mm) 的雷达。装备汽车的毫米波雷达的主要功能在于,识别行驶过程中遇到的物体和障碍物,感知前方物体的距离、相对速度等信息,还可以同时简单识别出道路上的不同物体。
和激光雷达相比,毫米波雷达的波长更大,在大气中传播时的衰减更小,受自然光和热辐射源的影响也小,因此毫米波雷达的环境适用性要明显优于激光雷达。
远距离雷达和中距离雷达是无人驾驶汽车的典型配置,实现探测目标方位及相对速度、保持车距以及紧急制动等功能。它们都属于毫米波雷达,工作频率为 77 GHz。
远距离雷达和中距离雷达通常安装在前保险杠蒙皮靠近中间区域,允许感知元件在车身宽度方向上有一定偏差,但此时需要相应调整无人驾驶系统的匹配参数。
由于毫米波雷达的识别精度低于激光雷达,所以可以将雷达固定在保险杠横梁等与白车身刚性连接的零件上,也可以通过塑料支架将雷达固定在保险杠蒙皮上。
中 /远距离雷达的探测范围内,一般不允许有汽车零件遮挡,否则会影响雷达的工作性能。如果出于造型和美观考虑,一定要在雷达前方布置遮挡零件,则遮挡零件( 包括油漆层) 材料的介电常数和厚度必须满足雷达波穿透率的要求。
除此以外,在雷达的探测范围内不能出现诸如卡扣、格栅等影响雷达工作性能的结构或造型元素。
在考虑雷达固定位置和探测范围的时候,需要考虑各零件的安装误差、热力几何变形以及零件因长时间运动和重力作用产生的移动量。
如保险杠蒙皮在整个生命周期内的自然下沉量,其大小与保险杠蒙皮采用的固定结构有关。在设计雷达前方零件如格栅开口的过程中需要对这些因素加以注意。
在车辆发生轻微碰撞之后,为了尽可能保证雷达的功能不受到影响,减小维修成本,需要采取特定的安全措施对雷达加以保护,常见的安全保护措施有:
( 1) 尽量将雷达靠后布置,使得雷达在轻微碰撞过程中,碰撞物的侵入量不足以撞上雷达; 或者也可以将雷达布置在保险杠横梁的后部,以此进行一定程度的保护;
( 2) 在固定雷达的支架上加装保护结构,使得雷达在碰撞过程中可以得到缓冲保护;
( 3) 在固定雷达的支架上设计溃缩结构,可以使支架在受力时溃缩,避免雷达遭受更严重的损伤;
( 4) 考虑到国家法规 GB 17354 - 1998 的要求,雷达的布置位置应尽可能在高度方向上避开摆锤的突出部分,如图 3 所示。
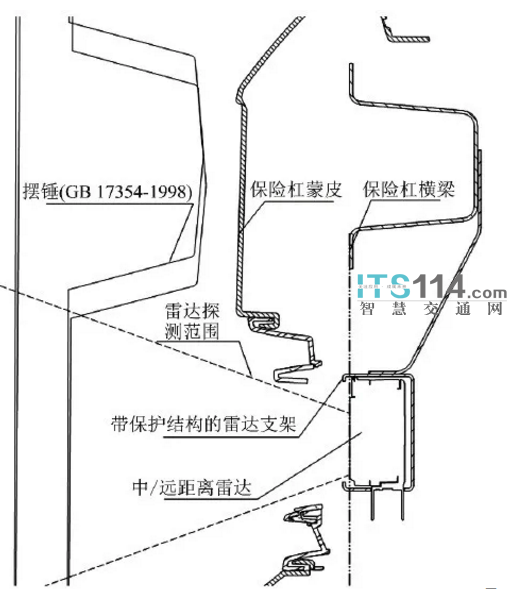
图3 中/远距离雷达布置示意图
为了给无人驾驶提供辅助功能,帮助进行盲点检测、车道变更辅助、碰撞预警等功能,无人驾驶车辆的四角位置需要布置短距离雷达( SRR) ,监测车辆侧向的交通状况。短距离雷达的工作原理也属于毫米波雷达范畴。
短距离雷达的布置位置是在整车前后保险杠区域的侧面部位,整车集成过程中需要考虑的因素和中 /远距离雷达类似。
激光雷达的整车集成方案
激光雷达通过点云来建立周边环境的 3D 模型,可以检测出包括车辆、行人、树木、路沿等细节。激光雷达用来描绘周围环境的几个主要参数,包括线数、点密度、水平垂直视角、检测距离、扫描频率、精度等。
除了位置和距离信息,激光雷达还提供返回所扫描物体的密度信息,后续算法据此可以判断扫描物体的反射率,再进行下一步处理。
大多数无人驾驶汽车在车顶安装有激光雷达,如谷歌和百度无人驾驶汽车都在车顶装备有64 线激光雷达。以谷歌无人驾驶汽车为例,其车顶激光雷达是由 Velodyne公司设计提供的,型号为 HDL - 64E,其水平视野范围为 360°,垂直视野范围为 28.6°。
与毫米波雷达相比,激光雷达的探测精度更高,目标分类和识别能力更强,但是激光雷达受天气等周边环境的影响较大,雨雪雾天气都会导致激光雷达的性能变差,如表 1 所示。在整车布置过程中需要考虑到这些因素。
表1 毫米波雷达和激光雷达主要性能对比

因为激光雷达的探测精度高,所以对雷达本身的位置变化也相对敏感。以 Velodyne HDL -64E 激光雷达为例,出厂时对每束激光校准参数都已进行标定,但在使用时,一般还需对该校准参数进行重新标定。
为了减少无人驾驶汽车的标定和维护成本,需要尽可能将激光雷达与整车刚性连接,减少使用过程中的相对位移量。
为保证车顶激光雷达能够均匀探测到整车周围的环境,雷达应该布置在整车车顶的中心区域,其安装高度应该由雷达的探测范围和车身轮廓共同决定,要求激光雷达的探测范围内不能有车身零件的遮挡,雷达的探测盲区应该小于无人驾驶整车系统标定的要求值,如图 4 所示。
车顶激光雷达应该通过支架等方式固定到白车身较为坚固的部位,如侧围加强板等零件,以保证固定结构坚固,并且尽量减少整车生命周期内激光雷达的位移量。

图4 车顶激光雷达的安装高度示意图
激光雷达的环境适应性比较弱,所以需要为雷达配置相应附加功能,尽可能保证激光雷达在不同工况下的工作性能。例如,为提高激光雷达在扬尘环境下的工作稳定性,需要配备清洗功能。
又如,为提高雷达在冰雪天气下的稳定性,防止雷达自身积雪结冰,需要配备加热功能。如果激光雷达自身的零件系统不能集成这些功能,那在整车集成的过程中,就需要考虑这些功能元件的布置空间和安装固定方式。
车顶激光雷达在行驶过程中,遭遇碰撞的情况相对较少,一般只会出现在高空坠物、区域限高或者车辆翻滚的情况下。设计过程中可以根据车辆实际的应用条件,考虑布置相应的保护措施。
有些无人驾驶汽车会在整车前后保险杠区域布置激光雷达,实现目标识别、车道识别和视野补充等功能。如图 5 所示。

图5 Junior无人驾驶车辆和感知元件
保险杠区域的激光雷达工作原理以及布置原则和车顶激光雷达类似,对于整车集成工作来说,有 3 个特殊的情况需要注意。
( 1) 保险杠区域的激光雷达不能直接固定在塑料件上,而是应该通过( 金属) 支架的形式固定到保险杠横梁或者白车身上。这是因为,保险杠在整个生命周期中会有 5 mm 以上的相对位移量,这种数量级的位移量可能会导致激光雷达的校准参数需要多次重新标定;
( 2) 考虑到塑料件生命周期的下沉量以及零件热力变形,在整车集成过程中,需要根据激光雷达的探测范围参数,妥善设计雷达周边零件和雷达的匹配关系,如开口和缝道尺寸、公差等;
( 3) 保险杠区域的激光雷达遭遇碰撞的概率相对较高,为了降低汽车轻微碰撞后的维护成本,应当采用和毫米波雷达类似的安全保护措施。
摄像头的整车集成方案
摄像头能够获取环境彩色景象信息,是无人车获取环境信息的第二大来源。以奥迪 A8 为例,整车一共配备有 4 个全景摄像头和一个前视摄像头。全景摄像头分别布置在整车前后和两侧外后视镜,前视摄像头则布置在内后视镜的基座位置。
全景摄像头系统工作过程中,由 4 个以上的摄像头对整车周边进行同时成像,然后再进行图像矫正和拼接,以获得全景图像( 见图 6) 。通过全景摄像头系统,整车可以获得车辆周围环境的全景图像,并实现目标识别。

图6 摄像头信号拼接图
前部的全景摄像头的位置通常处在前保险杠蒙皮( 包括格栅) 靠近中间区域( 见图 7) ,后部全景摄像头则可布置在后盖或后保险杠的中间区域。允许摄像头在车身宽度方向上有一定偏差,但此时需要整车图像处理系统进行相应匹配,避免出现图像畸变等失效现象。

图7 奥迪A8前部全景摄像头
布置全景摄像头时,要求摄像头的探测盲区应该小于无人驾驶整车系统标定的要求值。如果摄像头周边有发光元件如外部氛围灯,也要考虑避开摄像头的探测区域,否则可能影响图像后期处理的质量。
前后部的全景摄像头应当固定在保险杠蒙皮或者后盖零件上。由于全景摄像头的工作特点,一般摄像头必须固定在靠近车身边缘的区域。
在满足探测区域要求的前提下,应当让摄像头尽量靠后布置,降低摄像头在低速碰撞时受损的可能性。
大部分无人驾驶车型的侧面全景摄像头都集成在外后视镜上( 见图 8) ,这种方式使得侧面全景摄像头的布置不至于影响太多的车身零件,同时也能满足摄像头的工作要求。
有些概念车型甚至将外后视镜取消,直接用全景摄像头替代。在图像处理技术不断发展的情况下,这种功能集成的趋势是有很大可能实现的。

图8 奥迪A8侧面全景摄像头
除了全景摄像头之外,前视摄像头也是无人驾驶汽车的重要感知元件。通过前视摄像头,汽车不仅能够探测和识别道路上的车辆、行人等交通参与者,同时还能识别交通标志、隔离带、信号灯等交通信息。
绝大多数车型的前视摄像头都集成在内后视镜的基座上,摄像头处于车身正中位置。和激光雷达一样,摄像头也会受到天气等环境因素的影响,在整车集成过程中,需要根据实际情况,考虑是否增加相应的清洗和加热功能。
摄像头模块自身可以集成加热和清洗功能。如果摄像头模块的零件系统没有集成这些功能,那在整车集成的过程中,就需要根据实际使用情况,考虑这些功能元件的布置空间和安装固定方式。
前视摄像头的清洗和加热功能可以通过前风窗玻璃系统的相应功能元件来实现。
超声波雷达的整车集成方案
超声波感知元件是利用超声波的特性研制而成的感知元件。超声波在空气中传播时能量会有较大的衰减,难以得到准确的距离信息,一般不单独用于环境感知,或者仅仅用于对感知精度要求不高的场合,如倒车雷达的探测任务中。
超声波雷达已经在汽车行业得到了广泛应用,无人驾驶汽车的超声波雷达与传统车型的功能相似,主要是停车辅助等功能。因此,整车集成和注意事项也和传统车型一致,本文不再赘述。
结语
目前市场上还没有出现真正投入商用的 L4级以上无人驾驶汽车,各大主流企业的无人驾驶车辆都还处在试验阶段。
未来随着无人驾驶及其相关系统技术的发展,感知元件的种类、数量和工作参数都有可能发生变化。相应地,整车集成方案也应当随之进行调整。

VIP项目信息
- 公路信息化之800万以下中标项目汇总(4.1-4.15)
- ITS114 智能交通市场每周千万项目(3.29-4.04)
- ITS114 智能交通市场500万以下项目(3.29-4.04)
- ITS114 公路信息化市场每周千万项目(3.29-4.04)
- ITS114 安防市场每周千万项目(3.29-4.04)
- IOV114 运输信息化近期招标项目一览(4月NO.1)
- ITS114 智能交通市场每周千万项目(3.22-3.28)
- ITS114 智能交通市场500万以下项目(3.22-3.28)
- ITS114 公路信息化市场每周千万项目(3.22-3.28)
- ITS114 安防市场每周千万项目(3.22-3.28)
