未来交通技术发展现状和我国面临的挑战
导 语
近年来,未来交通技术发展势头强劲,引人瞩目。那么,国际上现在有哪些较具代表性的未来交通技术?发展情况如何?我国应如何利用这些未来交通技术以应对即将来临的挑战?请看公安部道路交通安全研究中心特约专家、交通工程师郭敏的介绍与分析。
当前的未来交通技术发展概况
总体而言,最近十年间的未来交通技术呈现出发展迅速、应用广泛的趋势,这里先简单列举几个例子予以说明:
C-ITS技术迅猛发展,尤其在欧洲,近两年达成一系列协议以推动C-ITS(协同式智能交通系统)发展,如欧盟易行战略(2018)和欧盟清洁、网联和自动车辆安全规则(2019)等;
DSRC及其他无线通信技术,如V2V、V2I、V2X等,共同推动了联网车辆的日渐成熟;
美国高速公路管理局(NHTSA)制定了无人驾驶车辆的五个级别,国际汽车工程师联合会(SAE)在此基础上发布了更为细化的版本;
地图软件Waze以众筹形式提供的定制和实时地图使地图可用性大大提高,并降低了地图制作门槛;打车软件uber传达的共享理念,可能使运输行业的闲置资源得到有效利用;
交通管理中心(TMC)、应急平台(新一代911系统)成为公共服务的支撑。自20世纪90年代至今,全美共建成93个交通管理中心(TMC),并与新一代911系统共同支撑了未来交通技术的发展。
具体说来,无人驾驶技术、C-ITS与联网车辆、MaaS技术、自动驾驶地图是目前颇具发展前景、较有代表性的几项未来交通技术。下面分别叙述这几项交通技术的发展情况。
1无人驾驶技术
2014年1月,Induct Technology公司推出了世界上第一款智能、全电动无人驾驶汽车Navia,适用于步行街、工厂园区、机场、主题公园、商业综合体、大学等场合。Navia时速12.5mph(约20.1km/h),最多可搭载8名乘客,已基本达到美国高速公路管理局(NHTSA)无人驾驶车辆级别表的L4级别。

图1:世界上第一款智能、全电动无人驾驶汽车Navia
图2展示了操控无人驾驶车辆的计算机的发展历程。在20世纪80年代时,其体积相当于一辆面包车车厢,非常庞大,经过数十年发展,体积已变得很小。

图2:操控无人驾驶车辆的计算机的发展历程
图3是别克研制的无人驾驶车辆工程图,车内装有很多与地磁通讯和计算机相关的设备,还处于测试阶段,无法工业化生产;而图4是美国谷歌公司研制的无人驾驶车辆工程图,车内与计算机相关的设备已成为一个个单独系列,已能够工业化生产。该设备单价75000美元,价格昂贵。
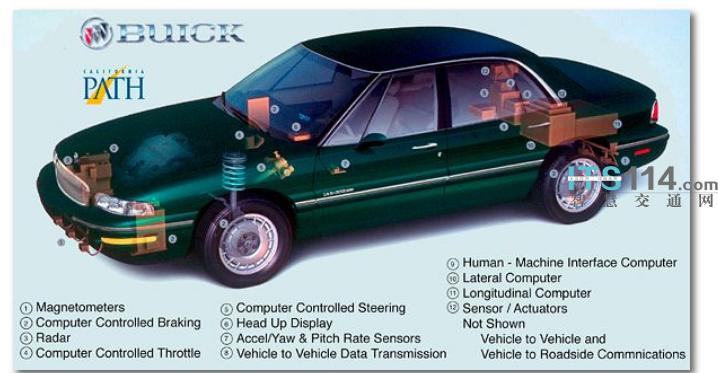
图3:别克的无人驾驶车辆
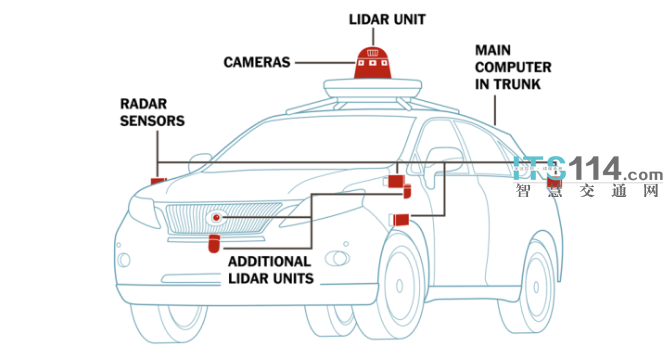
图4:美国谷歌公司的无人驾驶车辆
那么,无人驾驶车辆为什么需要安装这么多设备呢?因为在行驶时车辆需要通过雷达、摄像头、计算机和传感器等形成一个彩色的动态三维图,进而识别道路及道路上的车辆、行人、物体等。可以说,无人驾驶车辆上的每一种设备都有其目的所在,设备安装越多,车辆安全性越高。然而,这些设备的价格都很昂贵,在某种程度上可以说,无人驾驶车辆研发水平及能否广泛进入实际应用也受制于科研资金投入及其成本。
除了资金问题以外,无人驾驶车辆的发展还面临着哪些难题呢?
“场景难题”。人们在任何一个时段都可能乘车出行,而即便是同一路段,在不同时段的场景也不相同,因此无人驾驶车辆需要应对各种各样的不同场景。目前这一难题尚未得到完全解决,例如美国谷歌公司研发的Waymo虽然已行驶1000万英里,但也只能应付部分场景(见图5)。
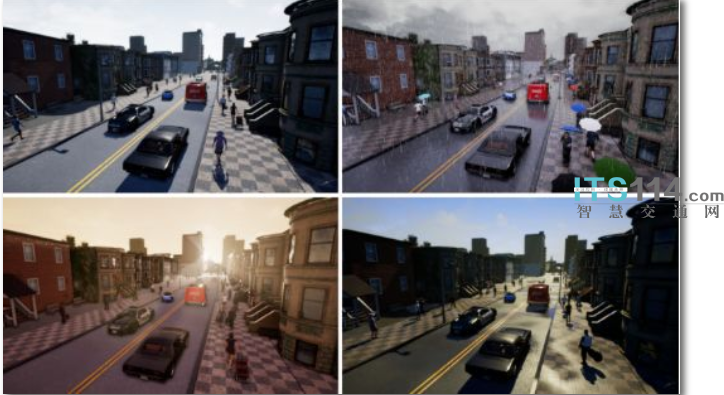
图5:同一路段在不同时段的场景不同
“误读难题”。例如,国外曾有这样一个实验:人们在停止标志上贴了一些其他图案,无人驾驶车辆的传感器在识别这块标志时将其误认为限速标志(见图6)。换句话说,只要简单地把一些图案贴在路面标志上,就可形成对无人驾驶车辆的“攻击”,使其误读。此外,无人驾驶车辆连接网络后很可能遭到恶意攻击。

图6:国外某次实验
“选择难题”(Ethical dilemma)。例如,当货物从货车上掉下来后,后方来不及采取制动的驾驶人需要作出选择:是直接撞向货物,还是撞向左右两侧的车辆(具体情形参见视频)?每种选择都会产生相应的后果。对人类而言,可以每种选择的后果并基于此做出选择,且要为之负责。然而,对于无人驾驶车辆而言,只有开发人员事先设定好此类情况下的选择程序时才能做出选择。那么,谁又有权力为无人驾驶车辆预先决定该如何选择呢?没有人。因为这一选择直接关系到驾驶人及他人的生死存亡。截止目前,这个“选择难题”尚未得到解决。
尽管面临着这么多难题,还是有很多涉足无人驾驶车辆的汽车厂商宣布将在2020或2021年制造出“真正”的无人驾驶车辆(见图7)。值得注意的是,其中还没有我国汽车厂商的官宣。个人认为,汽车厂商是推动未来交通发展的重要力量,因此,我国若想在未来交通领域有所作为,一定要让大量汽车厂商参与进来,作必要的技术支撑。

图7:一些汽车厂商的官宣
纵观从20世纪60年代至今的无人驾驶技术发展历程,可能已完成了90%的工作,预计再过一二十年,就能完成99%、甚至99.9999%的工作。然而,剩下的0.0001%工作什么时候能够完成?很难预测。
2C-ITS技术与联网车辆
从图8中可以看到,C-ITS技术里应用的DSRC技术的优势在于时延比较短,只有0.0002秒,比5G的数据传输速度还快,5G的速度指标是在0.001秒以内即可。
为什么大家都很注重时延问题呢?从图8右侧的表格可以看到,能够预先做出防止碰撞反应的时间是0.02秒,因为在高速公路上以正常速度行驶的车辆在0.02秒大概只能行驶不到一米的距离,如此设置可以给到提前反应的时间。应用到C-ITS里的所有通讯方式都必须满足时延0.02秒的要求。实际上这个延迟要求还会提高,目前一般认为要低于0.01秒。
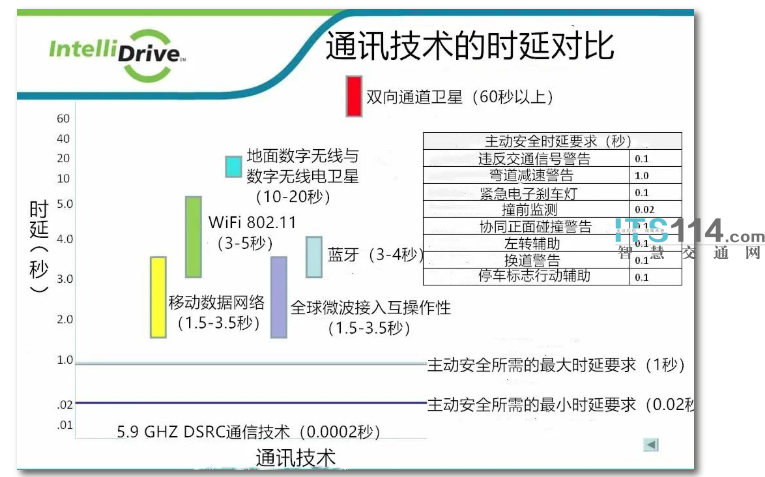
图8:美国DOT制作的联网车辆分级图
目前,C-ITS技术在世界上发展到了什么程度呢?
2013年6月,荷兰、德国与奥地利政府签署协议,正式启动C-ITS Corridor建设计划,为鹿特丹-法兰克福-维也纳道路提供2项服务,即道路障碍警示(Roadworks Warning, RWW)与侦测车辆数据收集(Probe Vehicle Data, PVD)(见图9)。
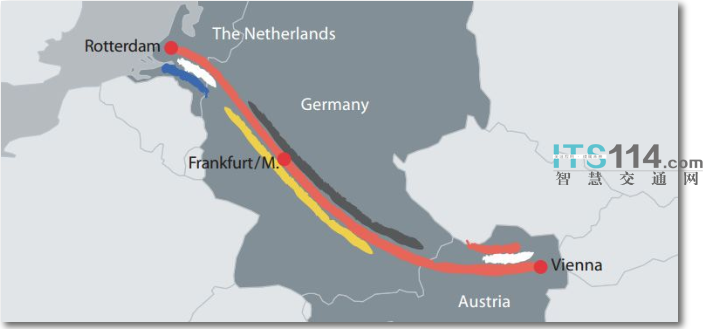
图9:C-ITS Corridor建设计划示意
2022年,欧盟将开始在一些发达地区的道路上设置作业区,用以告知联网车辆限速情况等信息,车辆根据这些信息进行相应操作。例如,当一辆车途经一条限速为130公里/小时的道路时,其最高速度只能达到限速值且无法继续加速。
2014年11月,欧盟协同智能运输系统部署平台(The Platform for the Deployment of Cooperative Intelligent Transport Systems)成立,分10个工作小组探讨了技术议题,依据社会效益、技术成熟程度,界定了Day1服务(短期)可发展项目和Day1.5服务可发展项目(见图10)。
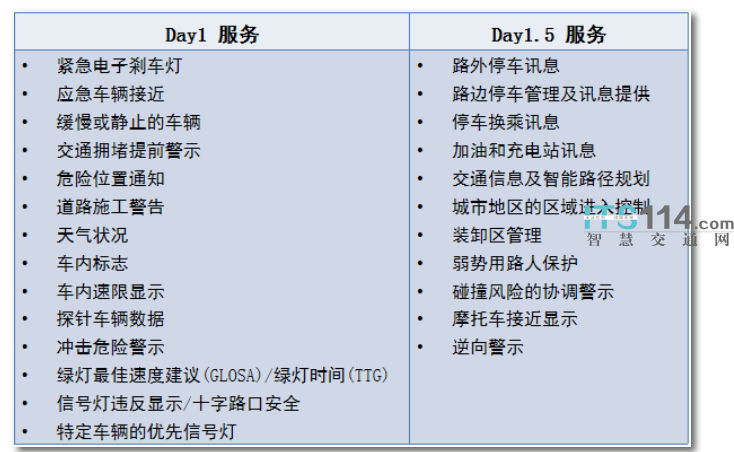
图10:Day1和Day1.5服务项目
美国组织了“2045年交通挑战赛”(Beyond Traffic 2045–Smart City Challenge),希望将自动化、开放数据、物联网、机器学习、联网车辆、需求反应式机动能力等不同技术都汇流于智能城市,彻底改变城市交通运输状况,显著提高各种交通方式的安全性和机动性,同时降低运输成本和对环境的不良影响,其实质就是通过对城市交通运输方式的改良让城市变得更美好。
我们的邻国日本也在这方面做了不少工作,例如,它在道路上设置了1600个ITS点。日本在2000年时就到达较高的技术水平,其研发的MIX导航系统能够精确定位每一辆车并进行实时指挥,但其问题在于很多系统的技术标准仅适用于日本国内,无法与国际接轨。
3MaaS技术
MaaS技术,即“易行打包技术”,也是当下比较热门的一项交通技术。现在经常会将其翻译成“出行即服务”,但笔者认为这一翻译搅浑了这项技术的含义,是错误的。出行什么不是服务呢,从古人坐马车开始就一直是服务。MaaS技术的含义并非在于客户的出行需求,而是在于出行过程的便捷,在于一键搞定途中所有换乘和支付。
为什么要称之为“打包”呢?其实MaaS技术要做的就是把各个公司提供的各种数据、服务以及客户的种种需求都打包在一起。比如,某人每个工作日的活动安排如下:早上送孩子上学,然后去上班,下班后从父母家接孩子回家。那他在工作日的出行就会产生相应的需求或问题:如果开车出行,到了学校在哪停车,到了单位在哪停车,到了父母家又在哪停车;如果不是驾车出行,则需要乘坐通往目的地的公共交通工具,而易行打包技术的目的就是为此提供共享车辆、定制公交等服务,以满足人们的这些需求。目前,该项技术已在英国的West Midlands和芬兰的赫尔辛基得到逐步应用。
如图11所示,易行打包技术源于欧洲,最初于1996年提出,2014年成为了一项专门技术并开始付诸实践。
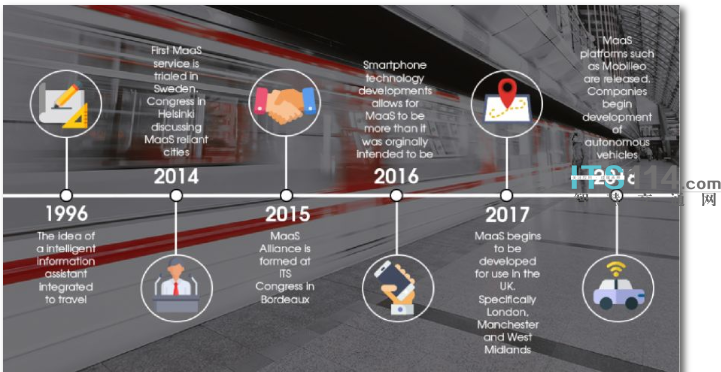
图11:易行打包技术发展历程
英国根据面向的不同人群,以及面向不同公共政策等维度,整理了易行打包技术能够做的事情,具体可分为MaaS提供商、数据提供商和运输服务提供商等多个层面,把这些零散数据和服务整合起来,从而为目标客户提供定制服务(见图12)。易行打包技术的定制服务较为灵活,可以根据客户每日不同需求进行调整。目前,我国一些公司实际上已具备提供易行打包技术的相应服务的能力。

图12:易行打包技术能够做的事情
4自动驾驶地图
自动驾驶地图,也有人称之为高清地图,有些人仅仅把自动驾驶地图理解为高清地图,即精度达到厘米级别的地图,但实际上,自动驾驶地图虽与高清地图有相同之处,但还是有一些特殊的需求。
图13是Lyft对自动驾驶地图的定义,将其分为基础层、几何层、语义层、先验层和实时层五层。其中,几何层是通过雷达扫描道路情况,构建三维图;语义层用以传达诸如路面标线宽度等具体信息;先验层提供信号灯周期、停车位情况等信息;实时层负责处理数据的实时传输交互。
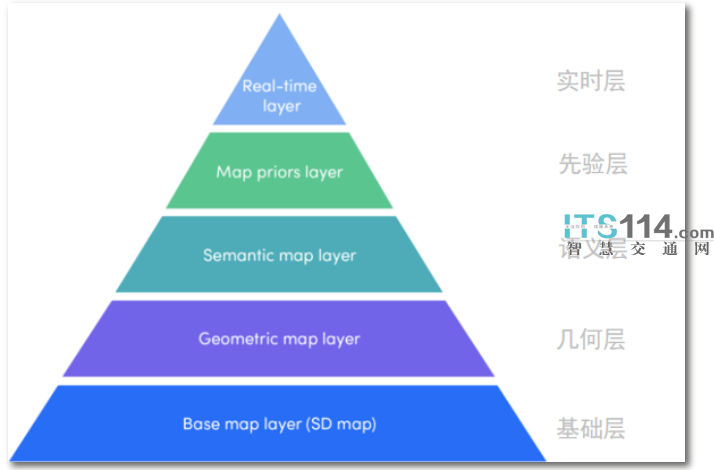
图13:Lyft对自动驾驶地图的定义
我国未来的交通发展面临的挑战
1未来的交通发展面临的挑战
图14是联合国对我国城市人口增长的预测。据预测,2050年我国城市人口将达到近10亿。城市人口的大量增长可以提高社会效率,但同时也会带来如拥堵、安全等交通问题。未来,我们面临的问题就是如何才能让市民们生活得更加舒适?
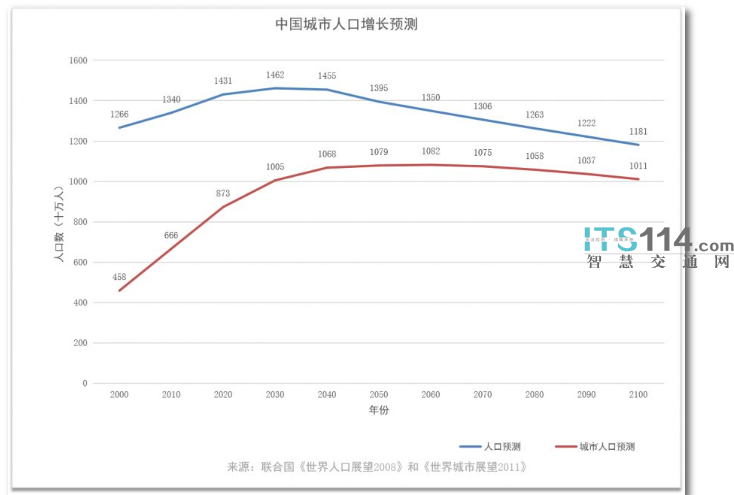
图14:联合国对我国城市人口增长的预测
据预测,到2025年,我国铁路网规模将达到17.5万公里左右,其中高速铁路3.8万公里左右;至2020年,我国城市轨道交通规划总里程将超过8500公里(不含有轨电车和市域轨道);我国未来的道路总里程将会超过600万公里。这些资产或者设施不仅面临着能否盈利的问题,还会面临能否持续运营的问题,因为其在未来一定需要进行必要的维修,这会耗费大量资金。美国在这方面考虑的较为周到,在一些法案中着重探讨了如何分配资金使老旧设施能够持续运营。
此外,未来还会面临如何消除拥堵、怎样降低交通事故死亡率等问题。
2如何应对挑战
在平台方面,应逐步形成类似于美国新一代911系统这样的平台,并使其切实发挥作用,这是一项公共服务的基础工作;
在无人驾驶技术方面,要让无人驾驶车辆行驶到足够的里程数,没有足够的实测,无人驾驶车辆的研究是没法起步的,因为对无人驾驶车辆的研究需要足够的里程数和在足够场景下的测试作为基础;
在地图应用方面,我国的地图应用程序已达到了一定水平,在使用体验上比谷歌地图还要好,下一步需要研究如何保护海量用户数据隐私的问题;
在C-ITS方面,前景并不算悲观,因为我国一些企业已在C-V2X和5G领域进行了布局;
在MaaS技术方面,很多流行的手机APP的提供商已掌握了众多用户信息,也拥有足够的资金,都具备了发展该技术的条件。
关于未来交通技术的发展方向,在笔者看来,未来交通技术就是发展满足人的基本需求的可持续交通,建立安全、清洁和能负担得起(例如,运营公共交通服务的公司能否负担得起公共交通的成本)的交通运输。

延伸阅读!
VIP项目信息
- 公路信息化之800万以下中标项目汇总(4.1-4.15)
- ITS114 智能交通市场每周千万项目(3.29-4.04)
- ITS114 智能交通市场500万以下项目(3.29-4.04)
- ITS114 公路信息化市场每周千万项目(3.29-4.04)
- ITS114 安防市场每周千万项目(3.29-4.04)
- IOV114 运输信息化近期招标项目一览(4月NO.1)
- ITS114 智能交通市场每周千万项目(3.22-3.28)
- ITS114 智能交通市场500万以下项目(3.22-3.28)
- ITS114 公路信息化市场每周千万项目(3.22-3.28)
- ITS114 安防市场每周千万项目(3.22-3.28)
