车路协同下的“绿波”控制
一、绿波交通信号控制
众所周知,近些年来城市的发展、技术的变革以及交通需求的变化,对信控的控制方式提出了更高的要求,控制方式也层出不穷,有传统的感应控制、自适应控制,包括时段的定周期控制、可变车道控制、溢出控制、匝道控制、瓶颈控制,以及接下来的绿波控制。实际上,在全国近百个城市的应用前提下,整个青岛信控的绿波控制覆盖率达到85%以上,由此可以看出,整个绿波控制在信号控制当中占据了一个核心的地位。而且它的控制效益从国际公认的道路通行手册研究表明,绿波控制对整个交通流时间的延误改善能够超过20%以上,这个是非常可观的改善。
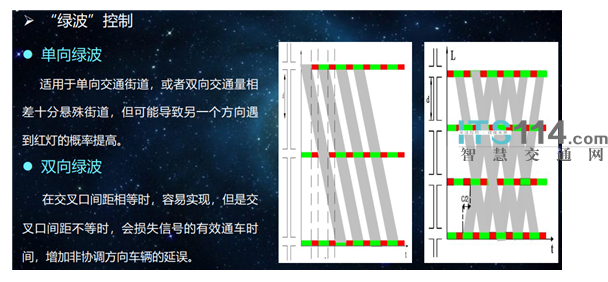
传统的绿波控制主要分为单向控制和双向控制(左图为单向控制,右图为双向控制)。单向控制主要是应用于单行线,或者有一些控制需求的道路。例如早晚高峰、上下班、交通流量、交通需求有明显差异的道路上面会应用单向控制。但是它所带来的弊端就是可能会影响控制协调的效果,遇到红灯的概率会比较高。
另外一种就是双向绿波,实际上双向绿波在交叉口等距的情况下比较容易实现,它应用的条件是非常苛刻的,大部分在做双向绿波控制的时候一般都是通过相位拆分或者相位搭接实现的。但是它可能会带来信号损失,而且会对其他非协调车辆的损失和延误有影响。
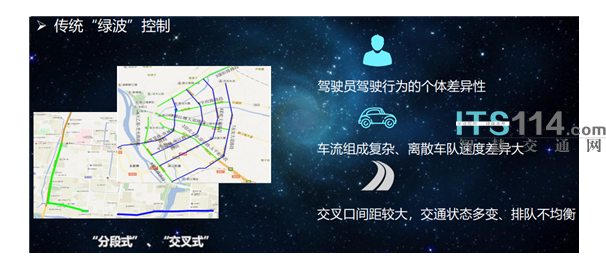
实际上在应用中会采用分段式或交叉式的控制,这个交叉口东西方向和南北方向都要协调,其实这个是在工程应用上面的具体措施。其实整体分析来看,影响整个绿波控制的因素有三点:第一是驾驶员驾驶行为的个性化差异导致的一些对车流、车速的影响;第二是整个交通流组成比较复杂、离散车队中间的速度差异比较大;第三是路网条件,交叉口的间距不均等,包括交通状态比较多变和排队不均衡。
二、车路协同下的信控数据

除去驾驶行为的不可控,车路协同未来的自动驾驶、无人驾驶的技术不断推出和应用对整体驾驶行为差异化的约束会越来越好。同时,问题出现了,路网数据怎么采集,它是不是能够完整采集得到?采集到这个路网数据如何应用?还有,交通流的数据如何采集?这个是按照车流控制还是按照车队控制?车流和车队的数据如何应用?这些就是现在基于车路协同下的绿波控制的思考。
随着车路协同技术应用不断完善,事实上后面只要基于无线通讯以及前端的传感、感知技术对车与路的信息提取,再通过车车、车路之间数据的信息交互和共享,最终实现车辆和基础设施之间的智能协同与配合,最终能够达到优先利用资源,提高道路交通安全,缓解交通拥堵的目的。
实际上在整个车路协同数据的采集方面,在车侧主要考虑到未来有三类数据要实现采集,第一是车辆定位信息,包括车辆的经纬度、车辆在车道上面准确位置、车与车之间的相对位置,这些数据都要采集;第二是车辆运行的状态,包括车辆当前的速度、加速度、转向的信息;第三是行车环境信息,包括道路的线形、车道的宽度、转弯半径、行人的状态、非机动车信息的采集,这些数据都可以通过路侧目前已有的电子警察、视频检测、RFID,还有车辆高精定位的GPS和RSU的接入,都可以获得车侧的数据。
第二是路侧的数据,主要考虑基于高精地图两种数据的采集。一种基于高精地图的静态数据和动态数据的采集,动态数据主要包括交通信息、道路的拥堵、交通管制、施工、道路通信能力。另一种是环境因素,包括天气,未来基于高精地图对于天气的信息都会体现在地图上面,施工占道的情况、交通事故的情况。
在静态高精地图上面主要是有两个,第一是车道模型,这个采集的信息比较大,高精地图技术再有一些发展,采集的信息量会非常大,包括车道线、车道中心线、车道的连接、车道属性的变化、曲率、坡度,包括未来道路部件,交通标识标牌、斑马线,以及每个交通标志牌上具体的信息,限速信息、路网信息都可以通过高精地图的采集给出一个输入。
通过这些数据的采集和融合,最终可以实现信控数据的维度升级,以前的信控数据都是宏观类的统计数据,未来车路协同下的信号数据采集,为什么讲维度升级呢?可以实时地采集到每一个交通参与者的个性化的数据。这个主要包括车与车、车与路、路与车、路与路之间的信息采集。车与车之间,包括车辆行为的分析,车流中各个车队的行为分析。车与路,包括路口车辆的路径选择,路段内车辆路径选择。路与路可以实现车辆通行空间的需求。路与车包括车流中车队的通行空间的需求。路与路之间可以采集到路段间的静态拓扑,包括路段间交通状态的拓扑。
这是基于车路协同下数据维度上的升级,随着数据的升级,控制也要跟上,所以未来基于车路协同下的绿波控制主要控制三方面,第一是以车流控制、车队控制为核心,其次是车辆个体行为分析,车流构成和车队通行需求,以快速响应车队通行的时间、空间需求为核心;第二是以规律分析,车路协同为基础,即基于车辆轨迹、基本分析单元,进行路网内的车辆集聚、分散运行特征的分析,通过这些分析进行道路通行能力、路网渠化、渠化结构与车队运行规律的协同分析。第三是以主动调整、信息服务为手段,以前的绿波控制都是静态的。未来车路协同下的绿波控制,肯定是主动式的、服务式的控制,也是根据车队构成和时空规律主动调整绿波的路径,包括信号相关的参数,为信息服务,提升绿波控制的整体效果。
三、车路协同下的“绿波”控制
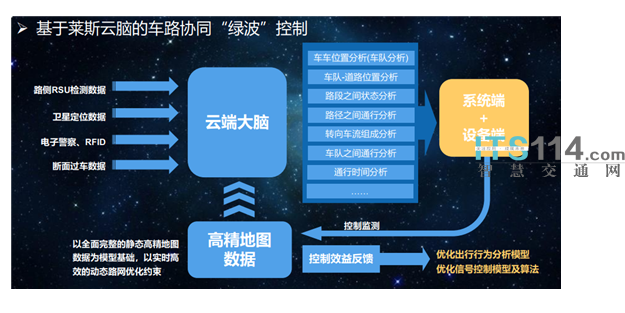
事实上,莱斯公司在近两三年全力打造这样的交通引导的产品体系,在交通引导产品体系的加持下,实际上通过前端的多元数据的采集、融合分析,对绿波控制当中的一些路车、车车、车路、路路之间的需求进行分析,然后在信号控制系统端和设备端进行实时的监控,最终在高精地图上面能够对控制效益进行一个实时的反馈,为出行行为分析模型和信号控制模型和算法提出更好的一些优化方案。这是整体的控制流程。
实际上在车路协同绿波控制上面,提供两个能力,第一个是协调路径的生成,是基于车队的路径选择进行绿波方案协调路径的生成。第二是控制方案的生成,这里主要有四个参数要实时生成优化,第一是基于路网的动静态数据和车队数据计算,优化整个绿波协调的信号周期;第二是根据车队间的间距和运行速度计算协调相位差;第三是以车队通行需求和车队运行速度动态调整绿波带宽;第四是以车队通行带宽为最小协调相位时长,均衡路口各流向通行需求计算绿信比。
关于车路协同“绿波”控制,提出了评价指标,这也是业内公认的两个指标,一个是绝对指标,一个是相对指标。绝对指标主要有三个,第一是协调方向单位绿灯时间平均通过量;第二是协调方向平均停车率,第三是非协调反向最大饱和度。相对指标也是有三个,第一是协调方向交通总流量变化率,第二是协调方向平均行程车速变化率,第三是非协调方向红灯启亮时刻最大排队长度变化率。对于停车延误改善,现在基于车路协同下未来绿波协调有望能够达到30%以上。
四、车路协同与信号控制展望
最后,关于整个基于车路协同信号控制的思考,主要是两部分,第一是如何做好服务型的交通信号控制,主要有六个方面:系统功能;设备性能;控制的机制;信息交互;计算实现;环境感知。
第二是如何做好服务型的交通信号控制产品,基于交通云脑开放的主题思想,未来在服务型交通信号控制方面有六大能力需要去打造:全时空的感知;跨领域的研判;个性化的服务;区域性协调;开放式支撑;精细化管控。
本报告来源于2019年第十四届中国智能交通年会,未经本人确认。
作者单位:南京莱斯信息技术股份有限公司交管事业部副总经理

延伸阅读!
VIP项目信息
- 公路信息化之800万以下中标项目汇总(4.1-4.15)
- ITS114 智能交通市场每周千万项目(3.29-4.04)
- ITS114 智能交通市场500万以下项目(3.29-4.04)
- ITS114 公路信息化市场每周千万项目(3.29-4.04)
- ITS114 安防市场每周千万项目(3.29-4.04)
- IOV114 运输信息化近期招标项目一览(4月NO.1)
- ITS114 智能交通市场每周千万项目(3.22-3.28)
- ITS114 智能交通市场500万以下项目(3.22-3.28)
- ITS114 公路信息化市场每周千万项目(3.22-3.28)
- ITS114 安防市场每周千万项目(3.22-3.28)
